Watchdog
Watchdog 概述
Watchdog 支持窗口模式和普通模式,普通模式需要在计时器减为0之前喂狗;窗口模式规定需要在窗口期内喂狗,窗口期为第一次 Timeout 到第二次 Timeout 之间,可配置在第一次 Timeout 时产生中断信号,如果在窗口期内没有喂狗或在窗口期外喂狗都会产生看门狗重启信号至 MCU,由 MCU 来控制重启。 SOC 包含13个看门狗,分布如下:Acore 共6个、MCU 共3个、VDSP 共1个、BPU 共2个、HSM 共1个,Acore Watchdog 具体使用情况如下表所示:
| Watchdog0 | 预留给客户 |
| Watchdog1 | 监控 Acore IRQ 响应超时,Timeout 为161ms |
| Watchdog2 | 监控 Acore Kthread 响应超时,Timeout 为5162ms |
| Watchdog3 | 预留给客户 |
| Watchdog4 | 预留给客户 |
| Watchdog5 | 预留给客户 |
Watchdog 支持窗口模式和普通模式,普通模式需要在计时器减为0之前喂狗;窗口模式规定需要在窗口期内喂狗,窗口期为第一次 Timeout 到第二次 Timeout 之间,可配置在第一次 Timeout 时产生中断信号,如果在窗口期内没有喂狗或在窗口期外喂狗都会产生看门狗重启信号至 MCU,由 MCU 来控制重启。 SOC 包含18个看门狗,分布如下:Acore 共2个、MCU 共5个、VDSP 共2个、BPU 共8个、HSM 共1个,Acore Watchdog 具体使用情况如下表所示:
| Watchdog0 | 监控 Acore IRQ 响应超时,Timeout 为161ms |
| Watchdog1 | 监控 Acore Kthread 响应超时,Timeout 为5162ms |
特性
窗口看门狗(window Watchdog)是功能安全产品常用的特殊看门狗。
-
窗口指的是,如果使能了窗口模式,那么原有的一次 Timeout 就上报 reset 信号的机制会发生变更。
-
第一次 Timeout 之前,是禁止区域,不允许喂狗操作,否则会上报 reset 信号。
-
第一次与第二次 Timeout 之间,是允许区域,允许喂狗操作,超时不喂狗会上报 reset 信号。

设备树
在设备树中增加看门狗的硬件信息描述(位置:code/source/hobot-drivers/kernel-dts/arch/arm64/boot/dts/hobot/drobot-s100-soc.dtsi)
watchdog1: wdt@30110000 {
status = "okay";
ranges;
#address-cells = <2>;
#size-cells = <2>;
compatible = "snps,hb_wdt";
reg = <0x0 0x30110000 0x0 0x1000>; //the register address of the hardware
interrupt-parent = <&gic>;
interrupts = <GIC_SPI CPUSYS_CLUSTER_MP4_WWDT_WDT_INTR_1 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI CPUSYS_CLUSTER_MP4_WWDT_SYS_RST_INTR_1 IRQ_TYPE_EDGE_RISING>;
clocks = <&scmi_smc_clk CLK_IDX_TOP_CPU0_TIMER_WDT>;
resets = <&smc_reset RST_IDX_IP_CPU0_WWDT_PAUSE1>,
<&smc_reset RST_IDX_IP_CPU0_WWDT_1>;
snps,mode = "sw";
usage = "irq_mon";
timeout = <161>; // timeout 161ms
moduleid-ofst = <5>;
wdt_tee_regmap {
compatible = "syscon";
services = <&tee_regmap>;
reg = <0x0 0x300A0000 0x0 0x10000>;
};
};
设备树
在设备树中增加看门狗的硬件信息描述(位置:code/source/hobot-drivers/kernel-dts/arch/arm64/boot/dts/hobot/drobot-s600-soc.dtsi)
watchdog0: wdt@32260000 {
status = "okay";
ranges;
#address-cells = <2>;
#size-cells = <2>;
compatible = "snps,hb_wdt";
reg = <0x0 0x32260000 0x0 0x1000>;
interrupt-parent = <&gic>;
interrupts = <GIC_SPI CPUSYS_MP2_CLUSTER_MP2_WWDT_WDT_INTR_0 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI CPUSYS_MP2_CLUSTER_MP2_WWDT_SYS_RST_INTR_0 IRQ_TYPE_EDGE_RISING>;
clocks = <&clk_26m>;
resets = <&smc_reset RST_IDX_WWDT_PAUSE_MP2_0>,
<&smc_reset RST_IDX_WWDT_SOFT_RESET_MP2_0>;
snps,mode = "sw";
usage = "irq_mon";
timeout = <161>;
moduleid-ofst = <5>;
wdt_tee_regmap {
compatible = "syscon";
services = <&tee_regmap>;
reg = <0x0 0x32220000 0x0 0x10000>;
};
};
Watchdog 驱动代码
Watchdog 模块的驱动代码位于 /hobot-drivers/watchdog。
Watchdog Timeout
当监控 Acore 的 Watchdog Timeout 时,会触发中断发送到 MCU0侧,由 MCU 的任务触发 Acore 重启,在任务中会等待5s,使 Acore 侧完成堆栈的打印。

用户开发
目前 WDT1用于监控内核关中断超时,WDT2用于监控内核线程,其余 WDT0、WDT3、WDT4和 WDT5均支持在用户态通过 ioctl 接口对 Watchdog 进行操作,使用方式如下。
目前 WDT0用于监控内核关中断超时,WDT1用于监控内核线程
hb_wdt_ioctl.h 说明
用户态程序使用本文中的 ioctl 接口前,需自备头文件 hb_wdt_ioctl.h。头文件中:
WDT_MAGIC_NUM:取值为字符'W',用来标记「下面这组ioctl命令是给 watchdog 用的」。不同外设/驱动会用不同标记,这样内核不会把别的设备的命令和看门狗搞混(不必修改该值,与驱动保持一致即可)。HB_WDT_START、HB_WDT_RESTART等:在'W'这一标记下再区分的具体命令编号,对应下文各小节。
上述定义须与内核 watchdog 字符设备驱动保持一致。
文件内容
可将以下内容保存为 hb_wdt_ioctl.h:
#ifndef DRIVERS_WATCHDOG_HB_WDT_IOCTL_H_
#define DRIVERS_WATCHDOG_HB_WDT_IOCTL_H_
#define WDT_MAGIC_NUM 'W' /**< ioctl magic num*/
#define HB_WDT_START _IO(WDT_MAGIC_NUM, 1) /**< ioctl cmd to start*/
#define HB_WDT_STOP _IO(WDT_MAGIC_NUM, 2) /**< ioctl cmd to stop*/
#define HB_WDT_RESTART _IO(WDT_MAGIC_NUM, 3) /**< ioctl cmd to restart*/
#define HB_WDT_GETSTATUS _IO(WDT_MAGIC_NUM, 4) /**< ioctl cmd to get status*/
#define HB_WDT_SETTIMEOUT _IO(WDT_MAGIC_NUM, 5) /**< ioctl cmd to set timeout*/
#define HB_WDT_GETTIMEOUT _IO(WDT_MAGIC_NUM, 6) /**< ioctl cmd to get timeout*/
#define HB_WDT_GETTIMELEFT _IO(WDT_MAGIC_NUM, 7) /**< ioctl cmd to get timeleft*/
#define HB_WDT_SETMODE _IO(WDT_MAGIC_NUM, 8) /**< ioctl cmd to set mode*/
#define HB_WDT_GETMODE _IO(WDT_MAGIC_NUM, 9) /**< ioctl cmd to get mode*/
#define HB_WDT_PAUSE _IO(WDT_MAGIC_NUM, 10) /**< ioctl cmd to pause*/
#define HB_WDT_PROCEED _IO(WDT_MAGIC_NUM, 11) /**< ioctl cmd to proceed*/
#endif
使用方式
- Linux 用户态中,
_IO定义在<sys/ioctl.h>。若编译提示_IO未定义,须在包含hb_wdt_ioctl.h之前增加#include <sys/ioctl.h>,或将该 include 写在hb_wdt_ioctl.h内、且位于#define WDT_MAGIC_NUM之前。 - 在已对 watchdog 字符设备
open成功并得到有效文件描述符fd后,包含hb_wdt_ioctl.h,按手册下文各小节调用ioctl(fd, HB_WDT_xxx, &flags)。 - 若驱动侧变更
ioctl命令编号,须同步修改本头文件中的宏定义。
#include <sys/ioctl.h>
#include "hb_wdt_ioctl.h"
/* fd 为 watchdog 字符设备已打开的文件描述符 */
int flags = 0;
ret = ioctl(fd, HB_WDT_START, &flags);
HB_WDT_START
int flags = 0;
ret = ioctl(fd, HB_WDT_START, &flags);
功能描述:
- 开启看门狗
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_START:WDT START 的 ioctl 宏
- [IN/OUT] flags:保留参数传入 0 即可
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_STOP
int flags = 0;
ret = ioctl(fd, HB_WDT_STOP, &flags);
功能描述:
- 停止看门狗
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_STOP:WDT STOP 的 ioctl 宏
- [IN/OUT] flags:保留参数传入 0 即可
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_RESTART
int flags = 0;
ret = ioctl(fd, HB_WDT_RESTART, &flags);
功能描述:
- 对看门狗进行喂狗操作
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_RESTART:WDT RESTART 的 ioctl 宏
- [IN/OUT] flags:保留参数传入 0 即可
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_PAUSE
int flags = 0;
ret = ioctl(fd, HB_WDT_PAUSE, &flags);
功能描述:
- 暂停看门狗
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_PAUSE:WDT PAUSE 的 ioctl 宏
- [IN/OUT] flags:保留参数传入 0 即可
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_PROCEED
int flags = 0;
ret = ioctl(fd, HB_WDT_PROCEED, &flags);
功能描述:
- 在暂停看门狗后使看门狗继续运行
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_PROCEED:WDT PROCEED 的 ioctl 宏
- [IN/OUT] flags:保留参数传入 0 即可
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_SETTIMEOUT
int flags = 50;// Input: timeout value in milliseconds (e.g., 50)
ret = ioctl(fd, HB_WDT_SETTIMEOUT, &flags);
功能描述:
- 设置看门狗的 timeout,单位为 ms
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_SETTIMEOUT:WDT SETTIMEOUT 的 ioctl 宏
- [IN] flags:设置的 Timeout 值,单位为 ms
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_GETTIMEOUT
int flags = 0;
ret = ioctl(fd, HB_WDT_GETTIMEOUT, &flags);
功能描述:
- 获取看门狗的超时时间,单位为 ms
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_GETTIMEOUT:WDT GETTIMEOUT 的 ioctl 宏
- [OUT] flags:获取的看门狗的超时时间,单位为 ms
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_GETTIMELEFT
int flags = 0;
ret = ioctl(fd, HB_WDT_GETTIMELEFT, &flags);
功能描述:
- 获取看门狗的本次喂狗周期的剩余 timeout,单位为 ms
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_GETTIMELEFT:WDT GETTIMELEFT 的 ioctl 宏
- [OUT] flags:获取的看门狗的本次喂狗周期的剩余超时时间,单位为 ms
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_SETMODE
int flags = 34;
ret = ioctl(fd, HB_WDT_SETMODE, &flags);
功能描述:
- 设置看门狗的模式
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_SETMODE:WDT SETMODE 的 ioctl 宏
- [IN] flags:要设置的看门狗的模式,34表示有第一次 Timeout 中断的窗口狗模式,2表示没有第一次 Timeout 中断的窗口狗模式,0表示普通狗模式
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_GETMODE
int flags = 0;
ret = ioctl(fd, HB_WDT_GETMODE, &flags);
功能描述:
- 获取看门狗的模式
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_GETMODE:WDT GETMODE 的 ioctl 宏
- [OUT] flags: 获取的看门狗的模式,34表示有第一次 Timeout 中断的窗口狗模式,2表示没有第一次 Timeout 中断的窗口狗模式,0表示普通狗模式
返回值:
- 0: 成功
- 小于0: 失败
HB_WDT_GETSTATUS
int flags = 0;
ret = ioctl(fd, HB_WDT_GETSTATUS, &flags);
功能描述:
- 获取看门狗状态
参数描述:
- [IN] fd:WDT 文件描述符
- [IN] HB_WDT_GETSTATUS:WDT GETSTATUS 的 ioctl 宏
- [OUT] flags:获取的看门狗的状态,其中 bit0为1代表 Watchdog 已使能,bit0为0代表 Watchdog 未使能;bit1为1代表 Watchdog 处于暂停状态,bit1为0代表 Watchdog 处于非暂停状态,bit2为1代表 Watchdog 设置了 nowayout,bit2为0代表 Watchdog 未设置 nowayout
返回值:
- 0: 成功
- 小于0: 失败
Watchdog 监控方案
HardLockup 监控
HardLockup 监控基于 Watchdog 模块实现,使用 Watchdog1配置成窗口模式,在驱动中实现监控逻辑。当系统正常运行时监控逻辑如下图:
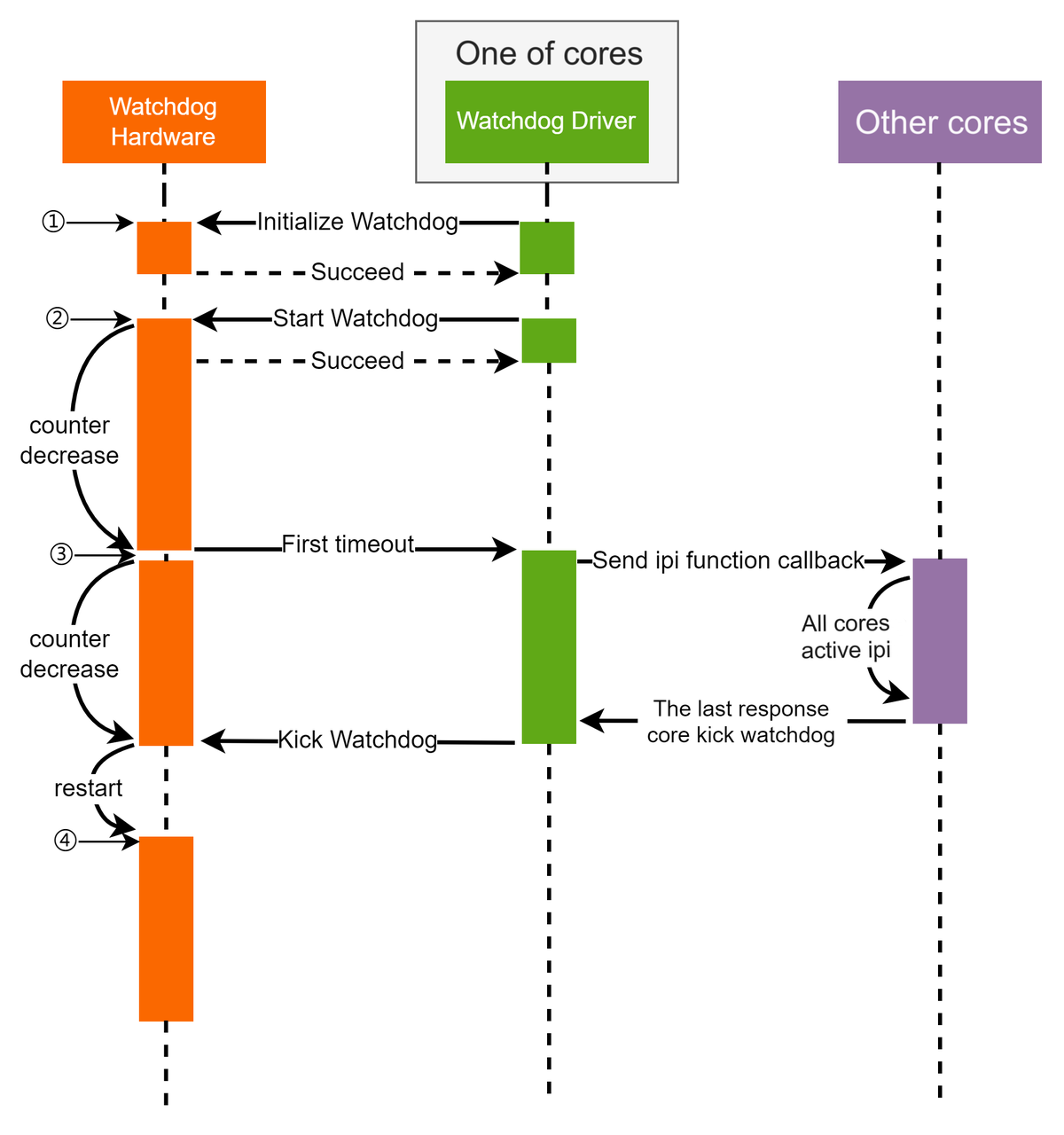
-
初始化 Watchdog 硬件。
-
开始 Watchdog 定时。
-
当第一次 Timeout 到来时产生一个中断,Watchdog 重新开始计数,某个 core 响应中断后给其它核发送 IPI,记录一张此时在线的 CPU 位图,每当一个 core 收到 IPI 中断或者下线时,会将位图对应的 bit 清除,当整个位图为 empty 时,说明本次监控任务完成,则允许喂狗。
-
喂狗后,Watchdog 重新开始下一个周期的计数。

-
初始化 Watchdog 硬件。
-
开始 Watchdog 定时。
-
当第一次 Timeout 到来产生一个中断,Watchdog 重新开始计数,某个 core 响应中断后给其它 core 发送 IPI,若 CPU 位图不为 empty,说明有 core 无法正常响应 IRQ 中断,不允许喂狗。
-
Watchdog 计数器继续递减,当第二次 Timeout 到来产生两个中断,一个中断发送到 Acore 的 GIC 中断,在中断中进行打栈,另一个为看门狗重启中断发送至 MCU,由 MCU 控制重启。MCU 会在第一次接收到狗叫对应的看门狗重启中断后,刷新一次狗的超时时间为2581ms,预留给 Acore 进行打栈,当再次触发狗叫对应的看门狗重启中断后,进行重启。
SoftLockup 监控
SoftLockup 监控基于 Watchdog 模块实现,使用 Watchdog2配置成窗口模式,在驱动中实现监控逻辑,整体监控思路与 HardLockup 监控一致。
-
初始化 Watchdog 硬件。
-
初始化 Per-CPU 的 Watchdog 监控 Kthread 线程,即每个 CPU 上都跑一个 Watchdog 监控 Kthread 线程。
-
开始 Watchdog 定时。
-
当第一次 Timeout 到来产生一个中断,Watchdog 重新开始计数,某个 core 响应中断后将置起一个标志位,跑在其上的 Watchdog 监控 Kthread 线程检测到标志位被置起后,将自己对��应的 CPU 位图中的 bit 清零,并给其它 core 发送 IPI,让其他核执行相同的逻辑,记录一张此时在线的 CPU 位图,每当一个核收到 IPI 执行该逻辑或者下线时,会将位图对应的 bit 清除,当整个位图为 empty 时,说明本次监控任务完成,则允许喂狗。
-
若在第二次 Timeout 之前 CPU 位图仍不为 empty,则当第二次 Timeout 到来产生两个中断,一个中断发送到 Acore 的 GIC 中断,在中断中进行打栈,另一个为看门狗重启中断发送至 MCU,由 MCU 控制重启。MCU 会在第一次接收到狗叫对应的看门狗重启中断后,刷新一次狗的超时时间为2581ms,预留给 Acore 进行打栈,当再次触发狗叫对应的看门狗重启中断后,进行重启。
HardLockup 监控
HardLockup 监控基于 Watchdog 模块实现,使用 Watchdog0配置成窗口模式,在驱动中实现监控逻辑。当系统正常运行时监控逻辑如下图:
-
初始化 Watchdog 硬件。
-
开始 Watchdog 定时。
-
当第一次 Timeout 到来时产生一个中断,Watchdog 重新开始计数,某个 core 响应中断后给其它核发送 IPI,记录一张此时在线的 CPU 位图,每当一个 core 收到 IPI 中断或者下线时,会将位图对应的 bit 清除,当整个位图为 empty 时,说明本次监控任��务完成,则允许喂狗。
-
喂狗后,Watchdog 重新开始下一个周期的计数。
-
初始化 Watchdog 硬件。
-
开始 Watchdog 定时。
-
当第一次 Timeout 到来产生一个中断,Watchdog 重新开始计数,某个 core 响应中断后给其它 core 发送 IPI,若 CPU 位图不为 empty,说明有 core 无法正常响应 IRQ 中断,不允许喂狗。
-
Watchdog 计数器继续递减,当第二次 Timeout 到来产生两个中断,一个中断发送到 Acore 的 GIC 中断,在中断中进行打栈,另一个为看门狗重启中断发送至 MCU,由 MCU 控制重启。MCU 会在第一次接收到狗叫对应的看门狗重启中断后,刷新一次狗的超时时间为2581ms,预留给 Acore 进行打栈,当再次触发狗叫对应的看门狗重启中断后,进行重启。
SoftLockup 监控
SoftLockup 监控基于 Watchdog 模块实现,使用 Watchdog1配置成窗口模式,在驱动中实现监控逻辑,整体监控思路与 HardLockup 监控一致。
-
初始化 Watchdog 硬件。
-
初始化 Per-CPU 的 Watchdog 监控 Kthread 线程,即每个 CPU 上都跑一个 Watchdog 监控 Kthread 线程。
-
开始 Watchdog 定时。
-
当第一次 Timeout 到来产生一个中断,Watchdog 重新开始计数,某个 core 响应中断后将置起一个标志位,跑在其上的 Watchdog 监控 Kthread 线程检测到标志位�被置起后,将自己对应的 CPU 位图中的 bit 清零,并给其它 core 发送 IPI,让其他核执行相同的逻辑,记录一张此时在线的 CPU 位图,每当一个核收到 IPI 执行该逻辑或者下线时,会将位图对应的 bit 清除,当整个位图为 empty 时,说明本次监控任务完成,则允许喂狗。
-
若在第二次 Timeout 之前 CPU 位图仍不为 empty,则当第二次 Timeout 到来产生两个中断,一个中断发送到 Acore 的 GIC 中断,在中断中进行打栈,另一个为看门狗重启中断发送至 MCU,由 MCU 控制重启。MCU 会在第一次接收到狗叫对应的看门狗重启中断后,刷新一次狗的超时时间为2581ms,预留给 Acore 进行打栈,当再次触发狗叫对应的看门狗重启中断后,进行重启。
注意事项
- 喂狗超时的重启方式由看门狗重启寄存器配置决定,目前重启由看门狗重启中断上报 MCU 驱动软件处理。
- 非窗口期喂狗会直接导致狗叫。