8.2.1. get_sif_data 使用说明
8.2.1.1. 程序功能
下图所示为X3M的视频数据通路框图,其中的专业名词解释请查看 多媒体开发概述-术语约定。
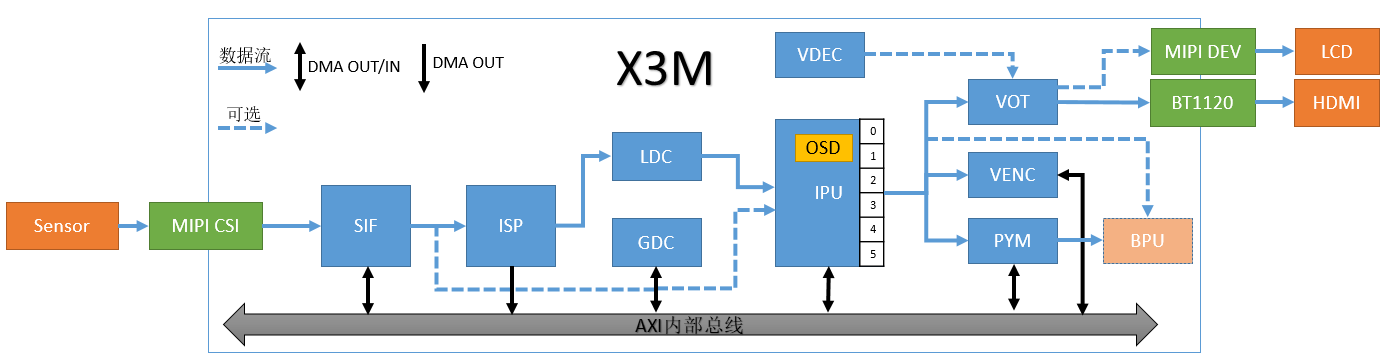
get_sif_data 完成 sensor 、MIPI CSI 和 SIF 模块的初始化,实现从SIF模块获取视频帧数据的功能,支持从SIF模块获取Raw、YUV两种格式的图像。
get_sif_data 可以有效帮助用户调试sensor和X3M的点亮调试,在打通sensor -> SIF的数据通路后,再调试其他模块的功能。
8.2.1.2. 程序开发
源码结构
源码位于 /app/multimedia_samples/get_sif_data
.
├── main.c # 主程序,完成sensor列表的加载,和命令控制
├── Makefile # 编译makefile
├── module.c
├── module.h
├── Readme.md
├── sensor_handle.c # sensor 初始化、从sif中获取图像的接口
├── sensor_handle.h
├── sensors # sensor参数配置,每个新sensor在本目录新增一个文件
│ ├── sensor_f37.c
│ └── sensor_imx415.c
└── sensors.lds
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成get_sif_data程序
$ cd sample/get_sif_data
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
get_sif_data main.c main.o Makefile module.c module.h module.o Readme.md sensor_handle.c sensor_handle.h sensor_handle.o sensors sensors.lds
添加新sensor
如果有新sensor需要调试,请参考 sensors 目录下的源码文件,对应添加一个新的sensor配置即可。
以F37为例说明关键代码:
/*
* 添加sensor、mipi、sif dev、isp的参数配置
* 各结构体中参数在代码中有已经有比较详细的注释说明
* 其中isp部分参数在本程序中无需关注
*/
static int set_sensor_param(void)
{
printf("set_sensor_param\n");
/*定义 sensor 初始化的属性信息 */
snsinfo = SENSOR_1LANE_F37_30FPS_10BIT_LINEAR_INFO;
/*定义 mipi 初始化参数信息 */
mipi_attr = MIPI_1LANE_SENSOR_F37_30FPS_10BIT_LINEAR_ATTR;
/*定义 dev 初始化的属性信息 */
devinfo = DEV_ATTR_F37_LINEAR_BASE;
/*定义 pipe 属性信息 */
pipeinfo = PIPE_ATTR_F37_LINEAR_BASE;
return sensor_sif_dev_init();
return 0;
}
/*
* 主程序遍历sensor模块时调用本函数完成sensor名和sensor参数配置接口的注册
*/
static int sensor_probe(void)
{
int i = 0;
/* 在sensor_lists里面找到一个空位置 */
for (i = 0; i < ARRAY_SIZE(sensor_lists); i++) {
if (0 == strlen(sensor_lists[i].sensor_tag)) break;
}
if (i >= ARRAY_SIZE(sensor_lists)) {
printf("sensor lists is full\n");
return -1;
}
strncpy(sensor_lists[i].sensor_tag, SENSOR_TAG, 31 > strlen(SENSOR_TAG) ? strlen(SENSOR_TAG) : 31);
sensor_lists[i].func = set_sensor_param;
return 0;
}
/* 注册sensor的模块入口,主程序在遍历sensor时会用到 */
SENSOR_MODULE_INSTALL(sensor_probe);
8.2.1.3. 功能使用
硬件连接
RDK X3 开发板通过mipi host接口用于连接Sensor模组,请根据当前要调试的Sensor模组型号正确连接。
程序部署
按照上面的编译流程生成出get_sif_data后,执行该程序,根据提示选择当前连接在开发板上的sensor类别,比如当前连接的是 F37 sensor,则选择 1。
如果初始化成功,会自动获取第一帧图像(pipe0_plane0_1920x1080_frame_001.raw)保存在程序运行的目录下(退出程序后执行 ls -l pipe0_plane0_1920x1080_frame_* 可以查看),并打印用户可以使用的命令,运行过程如下:
chmod +x get_sif_data
./get_sif_data
Horizon Robotics Sensor Test Tools V1.0
********************** Sensor Lists *************************
0 -- IMX415
1 -- F37
*************************************************************
Please select :1 # 选择 sensor
... ... # 一大段初始化日志
normal pipe_id (0)type(9)frame_id(1)buf_index(0)w x h(1920x1080) data_type 9 img_format 0
stride_size(2400) w x h1920 x 1080 size 2592000
pipe(0)dump normal raw frame id(1),plane(1)size(2592000) # 获取第一帧图像
filedump(pipe0_plane0_1920x1080_frame_001.raw, size(2592000) is successed
time cost 85 ms
dumpToFile raw cost time 85 ms********************** Command Lists *************************
q -- quit
g -- get one frame
l -- get a set frames
h -- print help message
Command:
命令解释:
g: 获取一帧图像,支持输入多个
g来连续获取图像,例如输入gggg
Command: g
normal pipe_id (0)type(9)frame_id(4078)buf_index(5)w x h(1920x1080) data_type 9 img_format 0
stride_size(2400) w x h1920 x 1080 size 2592000
pipe(0)dump normal raw frame id(4078),plane(1)size(2592000)
filedump(pipe0_plane0_1920x1080_frame_4078.raw, size(2592000) is successed
time cost 67 ms
dumpToFile raw cost time 67 ms
l: 连续获取12帧图像,相当于输入12个
g
Command: l
normal pipe_id (0)type(9)frame_id(4588)buf_index(3)w x h(1920x1080) data_type 9 img_format 0
stride_size(2400) w x h1920 x 1080 size 2592000
pipe(0)dump normal raw frame id(4588),plane(1)size(2592000)
filedump(pipe0_plane0_1920x1080_frame_4588.raw, size(2592000) is successed
time cost 56 ms
... ... # 连续的获取帧数据的打印
dumpToFile raw cost time 56 msnormal pipe_id (0)type(9)frame_id(4609)buf_index(7)w x h(1920x1080) data_type 9 img_format 0
stride_size(2400) w x h1920 x 1080 size 2592000
pipe(0)dump normal raw frame id(4609),plane(1)size(2592000)
filedump(pipe0_plane0_1920x1080_frame_4609.raw, size(2592000) is successed
time cost 57 ms
dumpToFile raw cost time 57 ms
q: 退出程序
Command: Command: q
quit
[ 256.825912] [S0][V1]sif_video_streamoff
[ 256.826439] SIF close node 1
[ 256.853045] [S0][V0]sif_video_streamoff SIF last process stream off
[ 256.853922] [S0][V0]sif_video_streamoff
[ 256.855476] hobot_dmcfreq_target: dmcfreq->rate:2666000000, target_rate:2666000000
[ 256.856460] buf:performance
[ 256.856460] , powersave_rate:2666000000, dmcfreq->pre_state:0
[ 256.857610] [S0][V0]x3_sif_close SIF last process close
[ 256.858301] SIF close node 0
[ 256.858807] [isp_drv]: camera_sys_stream_off: camera_sys_stream_off success line 1549 dev_name port_0
[ 256.860006] [isp_drv:cam]: camera_fop_release: line 115 port 0 user_num 0 camera_cdev->start_num 0
[ 256.861229] vps mipi_host1: sensor1_mclk set(1) 0 as 24000000
[ 256.861980] vps mipi_host1: sensor1_mclk set(0) 0 as 24000000
[ 256.862741] vps mipi_host0: sensor0_mclk set(2) 0 as 24000000
[ 256.863491] vps mipi_host0: sensor0_mclk set(1) 0 as 24000000
[ 256.864241] vps mipi_host0: sensor0_mclk set(0) 0 as 24000000
运行效果说明
执行程序后会获取到如 pipe0_plane0_1920x1080_frame_4609.raw 一样命名的raw图像,或者如pipe0_1920x1080_frame_1024.yuv一样命名的yuv图像。
请使用 hobotplayer 工具浏览图像,图像的参数配置说明如下:
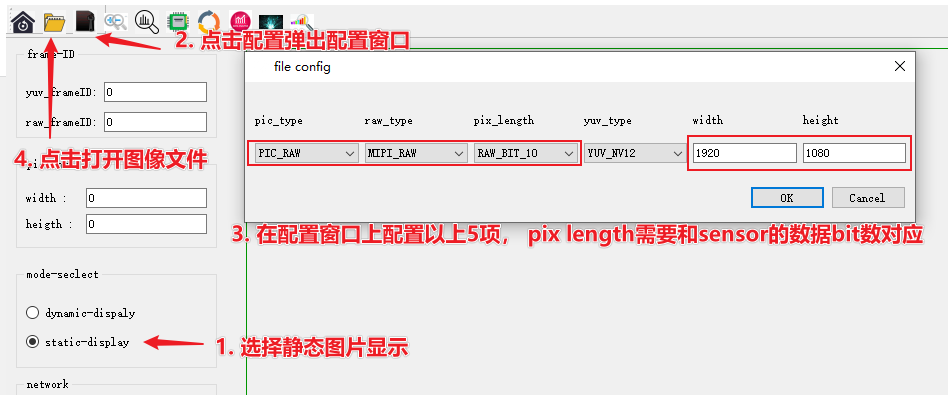
浏览RAW图
按照如下图所示步骤配置选项,其中file config里面关注pic_type、raw_type、 pix_length 、width和height的配置,F37 配置为(PIC_RAW、MIPI_RAW、RAW_BIT_10, 1920,1080),IMX415配置为(PIC_RAW、MIPI_RAW、RAW_BIT_12, 3840,2160)
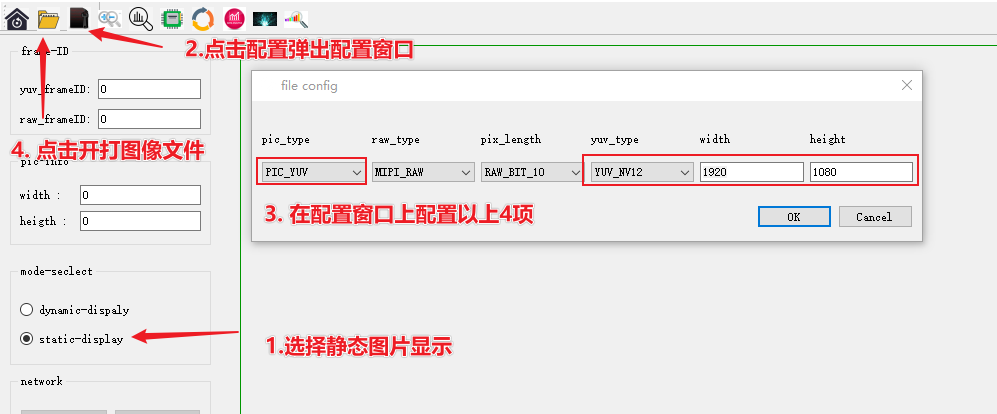
浏览YUV图
按照如下图所示步骤配置选项,其中file config里面关注pic_type、yuv_type、width和height的配置,F37 配置为(PIC_YUV、YUV_NV12, 1920,1080),IMX415配置为(YUV_NV12, 3840,2160)