7.1. 开发环境搭建及编译说明
7.1.1. 概述
本章节介绍交叉编译开发环境的要求及搭建,源码下载和系统镜像的编译方法说明。
7.1.2. 交叉编译开发环境
交叉编译是指在主机上开发和构建软件,然后把构建的软件部署到开发板上运行。主机一般拥有比开发板更高的性能和内存,可以加速代码的构建,可以安装更多的开发工具,方便开发。
主机编译环境要求
推荐使用 Ubuntu 操作系统,若使用其它系统版本,可能需要对编译环境做相应调整。
Ubuntu 18.04 系统安装以下软件包:
sudo apt-get install -y build-essential make cmake libpcre3 libpcre3-dev bc bison \
flex python-numpy mtd-utils zlib1g-dev debootstrap \
libdata-hexdumper-perl libncurses5-dev zip qemu-user-static \
curl git liblz4-tool apt-cacher-ng libssl-dev checkpolicy autoconf \
android-tools-fsutils mtools parted dosfstools udev rsync
Ubuntu 20.04 系统安装以下软件包:
sudo apt-get install -y build-essential make cmake libpcre3 libpcre3-dev bc bison \
flex python-numpy mtd-utils zlib1g-dev debootstrap \
libdata-hexdumper-perl libncurses5-dev zip qemu-user-static \
curl git liblz4-tool apt-cacher-ng libssl-dev checkpolicy autoconf \
android-sdk-libsparse-utils android-sdk-ext4-utils mtools parted dosfstools udev rsync
Ubuntu 22.04 系统安装以下软件包:
sudo apt-get install -y build-essential make cmake libpcre3 libpcre3-dev bc bison \
flex python3-numpy mtd-utils zlib1g-dev debootstrap \
libdata-hexdumper-perl libncurses5-dev zip qemu-user-static \
curl repo git liblz4-tool apt-cacher-ng libssl-dev checkpolicy autoconf \
android-sdk-libsparse-utils mtools parted dosfstools udev rsync
安装交叉编译工具链
执行以下命令下载交叉编译工具链:
curl -fO http://archive.sunrisepi.tech/toolchain/gcc-ubuntu-9.3.0-2020.03-x86_64-aarch64-linux-gnu.tar.xz
解压并安装,建议安装到/opt目录下,通常向/opt目录写数据需要sudo权限,例如:
sudo tar -xvf gcc-ubuntu-9.3.0-2020.03-x86_64-aarch64-linux-gnu.tar.xz -C /opt
配置交叉编译工具链的环境变量:
export CROSS_COMPILE=/opt/gcc-ubuntu-9.3.0-2020.03-x86_64-aarch64-linux-gnu/bin/aarch64-linux-gnu-
export LD_LIBRARY_PATH=/opt/gcc-ubuntu-9.3.0-2020.03-x86_64-aarch64-linux-gnu/lib/x86_64-linux-gnu:$LD_LIBRARY_PATH
export PATH=$PATH:/opt/gcc-ubuntu-9.3.0-2020.03-x86_64-aarch64-linux-gnu/bin/
export ARCH=arm64
以上命令是临时配置环境变量,要想配置永久生效,可以把以上命令添加到环境变量文件 ~/.profile 或者 ~/.bash_profile 的末尾。
7.1.3. 镜像编译源码(rdk-gen)
rdk-gen用于构建适用于地平线RDK X3的定制操作系统镜像。它提供了一个可扩展的框架,允许用户根据自己的需求定制和构建RDK X3的Ubuntu操作系统。
下载源码:
git clone https://github.com/HorizonRDK/rdk-gen.git
下载完成后,rdk-gen的目录结构如下:
| 目录 | 说明 |
|---|---|
| pack_image.sh | 构建系统镜像的代码入口 |
| download_samplefs.sh | 下载预先制作的基础ubuntu文件系统 |
| download_deb_pkgs.sh | 下载地平线的deb软件包,需要预装到系统镜像中,包括内核、多媒体库、示例代码、tros.bot等 |
| hobot_customize_rootfs.sh | 定制化修改ubuntu文件系统 |
| source_sync.sh | 下载源码,包括bootloader、uboot、kernel、示例代码等源码 |
| mk_kernel.sh | 编译内核、设备树和驱动模块 |
| mk_debs.sh | 生成deb软件包 |
| make_ubuntu_samplefs.sh | 制作ubuntu系统filesystem的代码,可以修改本脚本定制samplefs |
| config | 存放需要放到系统镜像/hobot/config目录下的内容,一个vfat根式的分区,如果是sd卡启动方式,用户可以在windows系统下直接修改该分区的内容。 |
7.1.4. 编译系统镜像
运行以下命令进行系统镜像的打包:
cd rdk-gen
sudo ./pack_image.sh
需要有sudo权限进行编译,成功后会在deploy目录下生成 *.img 的系统镜像文件。
7.1.4.1. pack_image.sh 编译过程介绍
调用 download_samplefs.sh 和 download_deb_pkgs.sh 两个脚本从地平线的文件服务器上下载samplefs和需要预装的deb软件包
解压samplefs,并调用 hobot_customize_rootfs.sh 脚本对filesystem做定制化配置
把deb安装进filesystem
生成系统镜像,参考 安装系统 使用系统镜像
7.1.5. 下载源代码
只运行pack_image.sh编译系统镜像是不需要下载源代码的,因为pack_image.sh会从地平线的文件服务器上下载官方的debian软件包直接安装进系统,只有当您需要修改debian软件包的内容,重新制作自定义软件包的时候才需要下载源代码。
rdk-linux相关的linux内核、bootloader、hobot-xxx软件包源码都托管在 GitHub上。在下载代码前,请先注册、登录 GitHub,并通过 Generating a new SSH key and adding it to the ssh-agent 方式添加开发服务器的SSH Key到用户设置中。
source_sync.sh用于下载源代码,包括bootloader、uboot、kernel、示例代码等,该下载程序通过执行 git clone git@github.com:xxx.git 的方式把所有源码下载到本地。
执行以下命令下载主线分支代码(官方维护的最新release版本分支):
./source_sync.sh -t main
执行以下命令下载开发分支代码(开发分支,测试不充分,可能会存在问题):
./source_sync.sh -t develop
如果想要下载官方系统镜像版本完全对应的源码,如下载2.0.0版本镜像的源码,请用以下命令:
./source_sync.sh -t os-image_2.0.0
该程序默认会把源码下载到 source 目录下:
source
├── bootloader
├── hobot-boot
├── hobot-bpu-drivers
├── hobot-camera
├── hobot-configs
├── hobot-display
├── hobot-dnn
├── hobot-dtb
├── hobot-io
├── hobot-io-samples
├── hobot-kernel-headers
├── hobot-multimedia
├── hobot-multimedia-dev
├── hobot-spdev
├── hobot-sp-samples
├── hobot-utils
├── hobot-wifi
└── kernel
7.1.6. 编译kernel
内核源码在 source/kernel,为方便内核的编译,提供mk_kernel.sh程序给用户使用。
执行以下命令编译linux内核:
./mk_kernel.sh
编译完成后,会在deploy/kernel目录下生成内核镜像、驱动模块、设备树、内核头文件。
dtb Image Image.lz4 kernel_headers modules
这些内容会被hobot-boot、hobot-dtb和hobot-kernel-headers三个debian包所使用,所以如果想要自定义修改这三个软件包,需要先编译内核。
7.1.7. 编译hobot-xxx软件包
hobot-xxx软件包是地平线维护的debian软件包的源码和配置,下载源码后,可以执行 mk_deb.sh 重新构建debian包。
帮助信息如下:
$ ./mk_debs.sh help
The debian package named by help is not supported, please check the input parameters.
./mk_deb.sh [all] | [deb_name]
hobot-multimedia-dev, Version 2.0.0
hobot-wifi, Version 2.0.0
hobot-camera, Version 2.0.0
hobot-dtb, Version 2.0.0
hobot-configs, Version 2.0.0
hobot-io, Version 2.0.0
hobot-spdev, Version 2.0.0
hobot-boot, Version 2.0.0
hobot-sp-samples, Version 2.0.0
hobot-bpu-drivers, Version 2.0.0
hobot-multimedia-samples, Version 2.0.0
hobot-dnn, Version 2.0.0
hobot-io-samples, Version 2.0.0
hobot-kernel-headers, Version 2.0.0
hobot-utils, Version 2.0.0
hobot-multimedia, Version 2.0.0
hobot-display, Version 2.0.0
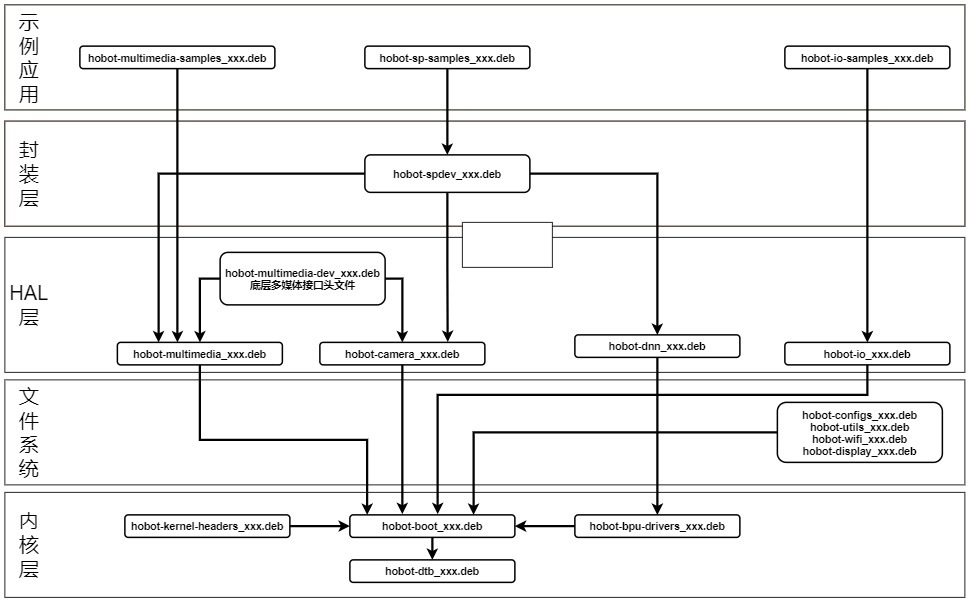
各debian包说明和关系如下所示:
| 包名称 | 内容说明或示例 |
|---|---|
| hobot-sp-samples_xxx.deb | 多媒体和算法的示例代码:包含vio的视频拉流和显示输出、编解码示例,图像分类、目标检测、分割等参考算法的示例 |
| hobot-io-samples_xxx.deb | 40Pin接口的使用示例代码:40Pin的Python语言的使用示例 |
| hobot-spdev_xxx.deb | 多媒体和算法的C/C++接口的封装库和头文件多媒体和算法的Python接口的封装库和头文件 |
| hobot-multimedia-dev_xxx.deb | 底层多媒体头文件 |
| hobot-multimedia_xxx.deb | 多媒体运行库文件:所有多媒体相关组件的运行库 so 文件,配置文件,固件等。 |
| hobot-multimedia-samples_xxx.deb | 基于底层多媒体接口的参考示例 |
| hobot-camera_xxx.deb | 适配的camera sensor的驱动和isp参数库 |
| hobot-dnn_xxx.deb | 所有与算法相关的 运行库和头文件 |
| hobot-io_xxx.deb | 40Pin管脚使用的接口和头文件(Python语言实现) |
| hobot-configs_xxx.deb | 地平线的自定义系统配置内容:udev配置、apt source配置、网络、蓝牙、usb配置、自启动项配置等 |
| hobot-utils_xxx.deb | 地平线官方提供的常用命令集 |
| hobot-display_xxx.deb | 图像显示相关,Hdmi、LCD显示的配置 |
| hobot-wifi_xxx.deb | Wi-Fi 和蓝牙模块的配置 |
| hobot-kernel-headers_xxx.deb | 内核编译后的配置文件和头文件,用于支持用户单独编译内核驱动 |
| hobot-boot_xxx.deb | 内核镜像文件Image和驱动模块文件 |
| hobot-bpu-driver_xxx.deb | bpu驱动 |
| hobot-dtb_xxx.deb | 内核设备树 |
7.1.7.1. 整体构建debian包
执行以下命令会重新全部构建所有的debian包(需要先完成kernel的编译):
./mk_deb.sh
构建完成后,会在deploy/deb_pkgs目录下生成deb软件包。
7.1.7.2. 单独构建debian包
mk_deb.sh 支持单独构建指定的软件包,在执行时带包名参数即可,例如:
./mk_deb.sh hobot-configs
7.1.7.3. 使用自定义的debian包
pack_image.sh不带参数运行时,默认从地平线文件服务器上下载最新发布的debian软件包安装进系统,如果您修改了同名软件包,则需要跳过从文件服务器上下载debian包的过程,可以在执行 pack_image.sh命令时带上任意选项参数即可,如以下命令则不会重新下载debian包,把自己做的包替换原来下载好的软件包后重新打包即可,例如您重新生成了hobot-boot,命名为 hobot-boot_2.0.0-customer_arm64.deb, 则用该文件替换deb_packages目录下的hobot-boot-xxx_arm64.deb文件。
sudo ./pack_image.sh c
如果您新增了自定义名称的软件包,想要安装进系统中,可以在rdk-gen目录下新建third_packages目录,然后把想要安装的debian包放在该目录中即可。放在third_packages目录中的软件包会和deb_packages目录下的软件包一起安装,互相不影响。
7.1.8. 编译bootloader
bootloader源码用于生成最小启动镜像disk_xxx_miniboot.img,生成包含分区表、spl、ddr、bl31、uboot一体的启动固件。
RDK X3的最小启动镜像一般会由地平线官方进行维护发布,可以从 miniboot 下载对应的版本,如果没有对uboot有修改需求可以直接使用官方发布的镜像。
按照以下步骤重新编译生成miniboot。
7.1.8.1. 同步uboot代码
执行命令下载uboot代码:
cd source/bootloader/
git submodule init
git submodule update
7.1.8.2. 选择板级配置文件
cd source/bootloader/build
./xbuild.sh lunch
You're building on #221-Ubuntu SMP Tue Apr 18 08:32:52 UTC 2023
Lunch menu... pick a combo:
0. horizon/x3/board_ubuntu_emmc_sdcard_config.mk
1. horizon/x3/board_ubuntu_emmc_sdcard_samsung_4GB_config.mk
2. horizon/x3/board_ubuntu_nand_sdcard_config.mk
3. horizon/x3/board_ubuntu_nand_sdcard_samsung_4GB_config.mk
Which would you like? [0] :
根据提示选择板级配置文件。
以上预置配置文件都是适配不同的开发板的硬件配置,区别在于使用的emmc或者nand烧录miniboot、ddr型号和容量、根文件系统不同:
| 板级配置文件 | 内存 | rootfs | 最小启动镜像存储器 | 主存储器 |
|---|---|---|---|---|
| board_ubuntu_emmc_sdcard_config.mk | LPDDR4 2GB | ubuntu-20.04 | eMMC | sdcard |
| board_ubuntu_emmc_sdcard_samsung_4GB_config.mk | LPDDR4 4GB | ubuntu-20.04 | eMMC | sdcard |
| board_ubuntu_nand_sdcard_config.mk | LPDDR4 2GB | ubuntu-20.04 | nand | sdcard/eMMC |
| board_ubuntu_nand_sdcard_samsung_4GB_config.mk | LPDDR4 4GB | ubuntu-20.04 | nand | sdcard/eMMC |
最小启动镜像存储器: 烧录miniboot的存储器,RDK X3、RDK X3 Module的用户请选择 nand
主存储器: ubuntu系统镜像的存储器,sdcard的系统镜像兼容eMMC,即可以烧录到Micro sd存储卡的镜像也可以烧录到eMMC
lunch命令还支持指定数字和板级配置文件名直接完成配置。
$ ./xbuild.sh lunch 2
You're building on #221-Ubuntu SMP Tue Apr 18 08:32:52 UTC 2023
You are selected board config: horizon/x3/board_ubuntu_nand_sdcard_config.mk
$ ./xbuild.sh lunch board_ubuntu_nand_sdcard_config.mk
You're building on #221-Ubuntu SMP Tue Apr 18 08:32:52 UTC 2023
You are selected board config: horizon/x3/board_ubuntu_nand_sdcard_config.mk
7.1.8.3. 整体编译bootloader
进入到build目录下,执行 xbuild.sh 进行整体编译:
cd build
./xbuild.sh
编译成功后,会在编译镜像输出目录(deploy_ubuntu_xxx) 目录下生成 miniboot.img, uboot.img, disk_nand_minimum_boot.img等镜像文件。其中disk_nand_minimum_boot.img即最小启动镜像文件。
7.1.8.4. 模块化编译bootloader
通过 xbuild.sh 脚本编译单独模块,生成的镜像文件会输出到编译镜像输出目录(deploy_ubuntu_xxx)下。
./xbuild.sh miniboot | uboot
miniboot: 调用mk_miniboot.sh 生成 miniboot.img
uboot: 调用mk_uboot.sh 生成 uboot.img
模块化编译后,可以执行 pack 命令打包 disk_nand_minimum_boot.img
./xbuild.sh pack
7.1.9. Ubuntu 文件系统制作
本章节介绍如何制作 samplefs_desktop-v2.0.0.tar.gz 文件系统,地平线会维护该文件系统,如果有定制化需求,则需按照本章说明重新制作。
7.1.9.1. 环境配置
建议使用ubuntu主机进行开发板ubuntu文件系统的制作,首先在主机环境安装以下软件包:
sudo apt-get install wget ca-certificates device-tree-compiler pv bc lzop zip binfmt-support \
build-essential ccache debootstrap ntpdate gawk gcc-arm-linux-gnueabihf qemu-user-static \
u-boot-tools uuid-dev zlib1g-dev unzip libusb-1.0-0-dev fakeroot parted pkg-config \
libncurses5-dev whiptail debian-keyring debian-archive-keyring f2fs-tools libfile-fcntllock-perl \
rsync libssl-dev nfs-kernel-server btrfs-progs ncurses-term p7zip-full kmod dosfstools \
libc6-dev-armhf-cross imagemagick curl patchutils liblz4-tool libpython2.7-dev linux-base swig acl \
python3-dev python3-distutils libfdt-dev locales ncurses-base pixz dialog systemd-container udev \
lib32stdc++6 libc6-i386 lib32ncurses5 lib32tinfo5 bison libbison-dev flex libfl-dev cryptsetup gpg \
gnupg1 gpgv1 gpgv2 cpio aria2 pigz dirmngr python3-distutils distcc git dos2unix apt-cacher-ng
7.1.9.2. 重点工具介绍
debootstrap
debootstrap是debian/ubuntu下的一个工具,用来构建一套基本的系统(根文件系统)。生成的目录符合Linux文件系统标准(FHS),即包含了 /boot、 /etc、 /bin、 /usr 等等目录,但它比发行版本的Linux体积小很多,当然功能也没那么强大,因此只能说是“基本的系统”,因此可以按照自身需求定制相应对ubuntu系统。
ubuntu系统(PC)下安装debootstrap
sudo apt-get install debootstrap
使用方式
# 可加参数指定源
sudo debootstrap --arch [平台] [发行版本代号] [目录] [源]
chroot
chroot,即 change root directory (更改 root 目录)。在 linux 系统中,系统默认的目录结构都是以 /,即是以根 (root) 开始的。而在使用 chroot 之后,系统的目录结构将以指定的位置作为 / 位置。
parted
parted命令是由GNU组织开发的一款功能强大的磁盘分区和分区大小调整工具,与fdisk不同,它支持调整分区的大小。作为一种设计用于Linux的工具,它没有构建成处理与fdisk关联的多种分区类型,但是,它可以处理最常见的分区格式,包括:ext2、ext3、fat16、fat32、NTFS、ReiserFS、JFS、XFS、UFS、HFS以及Linux交换分区。
7.1.9.3. 制作Ubuntu rootfs脚本代码
下载rdk-gen源码:
git clone https://github.com/HorizonRDK/rdk-gen.git
执行以下命令生成ubuntu文件系统:
mkdir ubuntu_rootfs
cd ubuntu_rootfs
cp ../make_ubuntu_rootfs.sh .
chmod +x make_ubuntu_rootfs.sh
sudo ./make_ubuntu_rootfs.sh
编译成功的输出结果:
desktop/ # 编译输出目录
├── focal-xj3-arm64 # 编译成功后生成的根文件系统,会有比较多的系统临时文件
├── samplefs_desktop-v2.0.0.tar.gz # 压缩打包 focal-xj3-arm64 内需要的内容
└── samplefs_desktop-v2.0.0.tar.gz.info # 当前系统安装了哪些 apt 包
rootfs/ # 解压 samplefs_desktop-v2.0.0.tar.gz 后应该包含以下文件
├── app
├── bin -> usr/bin
├── boot
├── dev
├── etc
├── home
├── lib -> usr/lib
├── media
├── mnt
├── opt
├── proc
├── root
├── run
├── sbin -> usr/sbin
├── srv
├── sys
├── tmp
├── userdata
├── usr
└── var
21 directories, 5 files
7.1.9.4. 定制化修改预装软件
代码中的关键变量定义:
PYTHON_PACKAGE_LIST: 安装的python包
DEBOOTSTRAP_LIST:debootstrap执行时安装的Debian软件包
BASE_PACKAGE_LIST: 最基本的UBuntu系统所需要安装的Debian软件包
SERVER_PACKAGE_LIST:Server 版本的Ubuntu系统会在基本版本上多安装的Debian软件包
DESKTOP_PACKAGE_LIST: 支持桌面图形化界面需要安装的软件包
地平线官方维护的 samplefs_desktop 文件系统会包含以上所有配置包的内容,用户可以根据自己的需求进行增、删。