10.4.12. PointPillars检测模型训练(无config && 无HAT Trainer)¶
这篇教程旨在详细介绍如何将 HAT 作为一个模型库(Model Library),并将其与用户自定义的训练框架结合使用,
在雷达点云数据集 KITTI-3DObject 上从头开始训练一个 PointPillars 模型。
文档中我们将探讨如何将 HAT 中的模型集成到用户的训练流程中,包括数据预处理、模型构建等关键步骤,帮助您成功地将 HAT 集成到您的训练框架中,并训练出 PointPillars 的浮点、量化和定点模型。
10.4.12.1. 数据集准备¶
在开始训练模型之前,第一步是需要准备好数据集,我们在KITTI官网下载 3DObject据集 ,包括4个文件:
left color images of object data setvelodyne point cloudscamera calibration matrices of object data settaining labels of object data set
下载上述4个文件后,解压并按照如下方式组织文件夹结构:
├── tmp_data
│ ├── kitti3d
│ │ ├── testing
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── velodyne
│ │ ├── training
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── label_2
│ │ │ ├── velodyne
为了创建KITTI点云数据,首先需要加载原始的点云数据并生成相关的包含目标标签和标注框的数据标注文件,
同时还需要为KITTI数据集生成每个单独的训练目标的点云数据,并将其存储在 data/kitti/gt_database 的 .bin 格式的文件中,
此外,需要为训练数据或者验证数据生成 .pkl 格式的包含数据信息的文件。
随后,通过运行下面的命令来创建KITTI数据:
mkdir ./tmp_data/kitti3d/ImageSets
# 从社区下载数据集划分文件
wget -c https://raw.githubusercontent.com/traveller59/second.pytorch/master/second/data/ImageSets/test.txt --no-check-certificate --content-disposition -O ./tmp_data/kitti3d/ImageSets/test.txt
wget -c https://raw.githubusercontent.com/traveller59/second.pytorch/master/second/data/ImageSets/train.txt --no-check-certificate --content-disposition -O ./tmp_data/kitti3d/ImageSets/train.txt
wget -c https://raw.githubusercontent.com/traveller59/second.pytorch/master/second/data/ImageSets/val.txt --no-check-certificate --content-disposition -O ./tmp_data/kitti3d/ImageSets/val.txt
wget -c https://raw.githubusercontent.com/traveller59/second.pytorch/master/second/data/ImageSets/trainval.txt --no-check-certificate --content-disposition -O ./tmp_data/kitti3d/ImageSets/trainval.txt
python3 tools/create_data.py --dataset "kitti3d" --root-dir "./tmp_data/kitti3d"
执行上述命令后,生成的文件目录如下:
├── tmp_data
│ ├──── kitti3d
│ │ ├── ImageSets
│ │ │ ├── test.txt
│ │ │ ├── train.txt
│ │ │ ├── trainval.txt
│ │ │ ├── val.txt
│ │ ├── testing
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── velodyne
│ │ │ ├── velodyne_reduced # 新生成的 velodyne_reduced
│ │ ├── training
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── label_2
│ │ │ ├── velodyne
│ │ │ ├── velodyne_reduced # 新生成的 velodyne_reduced
│ │ ├── kitti3d_gt_database # 新生成的 kitti_gt_database
│ │ │ ├── xxxxx.bin
│ │ ├── kitti3d_infos_train.pkl # 新生成的 kitti_infos_train.pkl
│ │ ├── kitti3d_infos_val.pkl # 新生成的 kitti_infos_val.pkl
│ │ ├── kitti3d_dbinfos_train.pkl # 新生成的 kitti_dbinfos_train.pkl
│ │ ├── kitti3d_infos_test.pkl # 新生成的 kitti_infos_test.pkl
│ │ ├── kitti3d_infos_trainval.pkl # 新生成的 kitti_infos_trainval.pkl
同时,为了提升训练的速度,我们对数据信息文件做了一个打包,将其转换成lmdb格式的数据集。 只需要运行下面的脚本,就可以成功实现转换:
python3 tools/datasets/kitti3d_packer.py --src-data-dir ./tmp_data/kitti3d/ --target-data-dir ./tmp_data/kitti3d --split-name train --pack-type lmdb
python3 tools/datasets/kitti3d_packer.py --src-data-dir ./tmp_data/kitti3d/ --target-data-dir ./tmp_data/kitti3d --split-name val --pack-type lmdb
上面这两条命令分别对应着转换训练数据集和验证数据集,打包完成之后,data目录下的文件结构应该如下所示:
├── tmp_data
│ ├──── kitti3d
│ │ ├── pack_data # 新生成的 lmdb
│ │ │ ├── train
│ │ │ ├── val
│ │ ├── ImageSets
│ │ │ ├── test.txt
│ │ │ ├── train.txt
│ │ │ ├── trainval.txt
│ │ │ ├── val.txt
│ │ ├── testing
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── velodyne
│ │ │ ├── velodyne_reduced
│ │ ├── training
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── label_2
│ │ │ ├── velodyne
│ │ │ ├── velodyne_reduced
│ │ ├── kitti3d_gt_database
│ │ │ ├── xxxxx.bin
│ │ ├── kitti3d_infos_train.pkl
│ │ ├── kitti3d_infos_val.pkl
│ │ ├── kitti3d_dbinfos_train.pkl
│ │ ├── kitti3d_infos_test.pkl
│ │ ├── kitti3d_infos_trainval.pkl
train_lmdb 和 val_lmdb 就是打包之后的训练数据集和验证数据集,也是网络最终读取的数据集, kitti3d_gt_database 和 kitti3d_dbinfos_train.pkl 是训练是用于采样的样本。
10.4.12.2. 浮点模型训练¶
数据集准备好之后,就可以开始模型训练相关的内容。
10.4.12.2.1. 模型构建¶
PointPillars的网络结构可以参考 论文 ,这里不做详细介绍。
从模型训练到编译上板的整个流程大致如下:
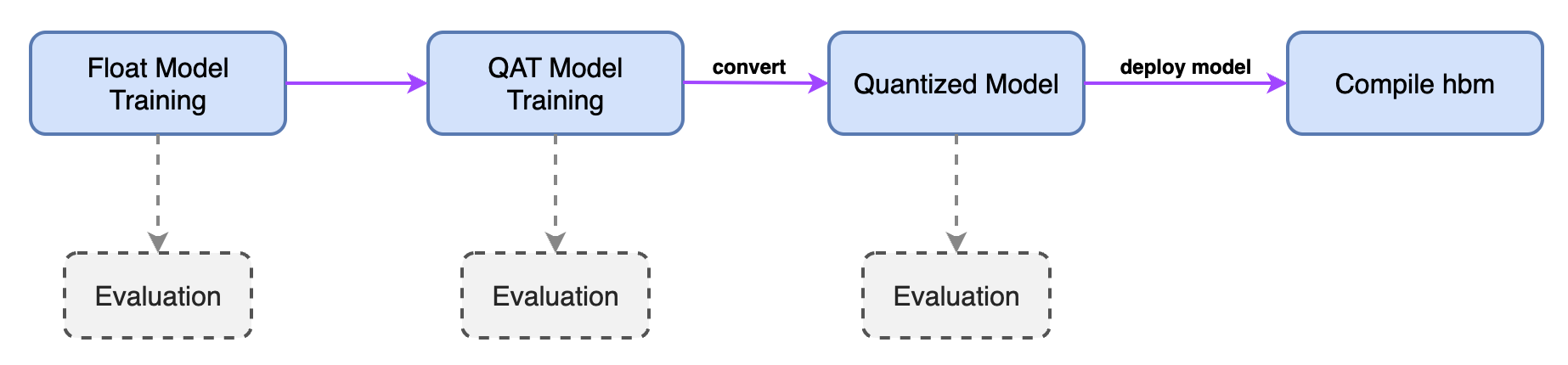
从上图中,主要用到了三个阶段的模型,即 Float Model、 QAT Model、 Quantized Model。其中:
Float Model: 即是一般的浮点模型。QAT Model: 即是插入伪量化结点的模型。Quantized Model: 即量化后的模型,参数为INT8类型。
此外,在训练、 编译等流程中又分别会使用不同结构或状态的模型:
model: 完整的模型结构,即包含模型前处理、网络结构、后处理,主要用于训练、评测。deploy_model: 只包含网络结构(可以编译到hbm中的部分),不包含前处理和后处理,主要用于编译。
我们通过定义一个 PointPillarsModel 类来与模型结构相关的所有内容,包含上述三个阶段: Float Model、 QAT Model、 Quantized Model 以及两种状态: model 和 deploy_model:
class PointPillarsModel:
task_name = "pointpillars_kitti_car" # 任务名(任意)
@classmethod
def model(cls):
"""模型结构"""
model = cls._build_pp_model(cls, is_deploy=False)
return model
@classmethod
def deploy_model(cls):
"""deploy model, 用于编译"""
deploy_model = cls._build_pp_model(cls, is_deploy=True)
return deploy_model
@classmethod
def deploy_inputs(cls):
"""deploy inputs, 用于编译"""
deploy_inputs = dict( # noqa C408
points=[
torch.randn(150000, 4),
],
)
return deploy_inputs
@classmethod
def float_model(cls, pretrain_ckpt=None):
"""浮点模型,加载参数"""
model = cls.model()
if pretrain_ckpt:
ckpt_loader = LoadCheckpoint(
pretrain_ckpt,
allow_miss=False,
ignore_extra=False,
verbose=True,
)
model = ckpt_loader(model)
return model
@classmethod
def qat_model(cls, pre_step_ckpt=None, pretrain_ckpt=None):
"""QAT 模型"""
float_model = cls.float_model(pre_step_ckpt)
qat_model = Float2QAT()(float_model)
if pretrain_ckpt:
ckpt_loader = LoadCheckpoint(
pretrain_ckpt,
allow_miss=False,
ignore_extra=False,
verbose=True,
)
qat_model = ckpt_loader(qat_model)
return qat_model
@classmethod
def int_infer_model(cls, pre_step_ckpt=None, pretrain_ckpt=None, use_deploy=False):
if use_deploy: # for training
model = cls.deploy_model() # float model
else: # for prediction
model = cls.model()
model = Float2QAT()(model) # qat model
if pre_step_ckpt: # load QAT checkpoint
qat_ckpt_loader = LoadCheckpoint(
pre_step_ckpt,
allow_miss=False,
ignore_extra=False,
verbose=True,
)
model = qat_ckpt_loader(model) # qat model with state_dict
int_model = QAT2Quantize()(model)
if pretrain_ckpt:
int_ckpt_loader = LoadCheckpoint(
pretrain_ckpt,
allow_miss=False,
ignore_extra=False,
verbose=True,
)
int_model = int_ckpt_loader(model)
return int_model
def _build_pp_model(self, is_deploy=False):
"""模型结构实现"""
# Voxelization cfg
pc_range = [0, -39.68, -3, 69.12, 39.68, 1]
voxel_size = [0.16, 0.16, 4.0]
max_points_in_voxel = 100
max_voxels_num = 12000
class_names = ["Car"]
def get_feature_map_size(point_cloud_range, voxel_size):
point_cloud_range = np.array(point_cloud_range, dtype=np.float32)
voxel_size = np.array(voxel_size, dtype=np.float32)
grid_size = (
point_cloud_range[3:] - point_cloud_range[:3]
) / voxel_size
grid_size = np.round(grid_size).astype(np.int64)
return grid_size
model = PointPillarsDetector(
feature_map_shape=get_feature_map_size(pc_range, voxel_size),
is_deploy=is_deploy,
pre_process=PointPillarsPreProcess(
pc_range=pc_range,
voxel_size=voxel_size,
max_voxels_num=max_voxels_num,
max_points_in_voxel=max_points_in_voxel,
),
reader=PillarFeatureNet(
num_input_features=4,
num_filters=(64,),
with_distance=False,
pool_size=(1, max_points_in_voxel),
voxel_size=voxel_size,
pc_range=pc_range,
bn_kwargs=None,
quantize=True,
use_4dim=True,
use_conv=True,
),
backbone=PointPillarScatter(
num_input_features=64,
use_horizon_pillar_scatter=True,
quantize=True,
),
neck=SECONDNeck(
in_feature_channel=64,
down_layer_nums=[3, 5, 5],
down_layer_strides=[2, 2, 2],
down_layer_channels=[64, 128, 256],
up_layer_strides=[1, 2, 4],
up_layer_channels=[128, 128, 128],
bn_kwargs=None,
quantize=True,
),
head=PointPillarsHead(
num_classes=len(class_names),
in_channels=sum([128, 128, 128]),
use_direction_classifier=True,
),
anchor_generator=Anchor3DGeneratorStride(
anchor_sizes=[[1.6, 3.9, 1.56]], # noqa B006
anchor_strides=[[0.32, 0.32, 0.0]], # noqa B006
anchor_offsets=[[0.16, -39.52, -1.78]], # noqa B006
rotations=[[0, 1.57]], # noqa B006
class_names=class_names,
match_thresholds=[0.6],
unmatch_thresholds=[0.45],
),
targets=LidarTargetAssigner(
box_coder=GroundBox3dCoder(n_dim=7),
class_names=class_names,
positive_fraction=-1,
),
loss=PointPillarsLoss(
num_classes=len(class_names),
loss_cls=FocalLossV2(
alpha=0.25,
gamma=2.0,
from_logits=False,
reduction="none",
loss_weight=1.0,
),
loss_bbox=SmoothL1Loss(
beta=1 / 9.0,
reduction="none",
loss_weight=2.0,
),
loss_dir=CrossEntropyLoss(
use_sigmoid=False,
reduction="none",
loss_weight=0.2,
),
),
postprocess=PointPillarsPostProcess(
num_classes=len(class_names),
box_coder=GroundBox3dCoder(n_dim=7),
use_direction_classifier=True,
num_direction_bins=2,
# test_cfg
use_rotate_nms=False,
nms_pre_max_size=1000,
nms_post_max_size=300,
nms_iou_threshold=0.5,
score_threshold=0.4,
post_center_limit_range=[0, -39.68, -5, 69.12, 39.68, 5],
max_per_img=100,
),
)
if is_deploy:
model.anchor_generator = None
model.targets = None
model.loss = None
model.postprocess = None
return model
至此, PointPillarsModel 中已定义了与模型相关的所有内容,在使用时可以很方便的通过 PointPillarsModel.xxx() 获取相应的模型结构。
在完成网络结构的定义之后,我们可以使用以下命令先测试一下网络的计算量和参数数量:
python3 examples/pointpillars_no_hat_trainer.py --calops
10.4.12.2.2. 数据增强¶
类似 模型构建 部分,我们通过定义一个 DataHelper 来实现数据相关内容,包括 transforms , data_loader 等:
class DataHelper:
data_dir = "./tmp_data/kitti3d" # 数据根目录
train_batch_size = 2 # 训练 batch_size
val_batch_size = 1 # 评测 batch_size
@classmethod
def train_data_loader(cls):
"""train dataloader 用于训练"""
return cls.build_dataloader(cls, is_training=True)
@classmethod
def val_data_loader(cls):
"""val dataloader 用于评测验证"""
return cls.build_dataloader(cls, is_training=False)
def build_dataloader(self, is_training=True):
"""构建 dataloader 的具体实现"""
transforms = self.build_transforms(self, self.data_dir, is_training)
split_dir = "train_lmdb" if is_training else "val_lmdb"
dataset = Kitti3D(
data_path=os.path.join(self.data_dir, split_dir),
transforms=transforms,
)
if is_training:
sampler = torch.utils.data.DistributedSampler(dataset)
else:
sampler = None
dataloader = torch.utils.data.DataLoader(
dataset=dataset,
batch_size=self.train_batch_size if is_training else self.val_batch_size,
sampler=sampler,
shuffle=False,
num_workers=1,
pin_memory=True,
collate_fn=hat.data.collates.collate_kitti3d,
)
return dataloader
def build_transforms(self, data_dir, is_training=True):
"""transforms 实现"""
class_names = ["Car"]
pc_range = [0, -39.68, -3, 69.12, 39.68, 1]
if is_training:
transforms = torchvision.transforms.Compose(
[
ObjectSample(
class_names=class_names,
remove_points_after_sample=False,
db_sampler=DataBaseSampler(
enable=True,
root_path=data_dir,
db_info_path=os.path.join(
data_dir, "kitti3d_dbinfos_train.pkl"
), # noqa E501
sample_groups=[dict(Car=15)], # noqa C408
db_prep_steps=[ # noqa C408
dict( # noqa C408
type="DBFilterByDifficulty",
filter_by_difficulty=[-1],
),
dict( # noqa C408
type="DBFilterByMinNumPoint",
filter_by_min_num_points=dict( # noqa C408
Car=5,
),
),
],
global_random_rotation_range_per_object=[0, 0],
rate=1.0,
),
),
ObjectNoise(
gt_rotation_noise=[-0.15707963267, 0.15707963267],
gt_loc_noise_std=[0.25, 0.25, 0.25],
global_random_rot_range=[0, 0],
num_try=100,
class_names=class_names,
),
PointRandomFlip(probability=0.5),
PointGlobalRotation(rotation=[-0.78539816, 0.78539816]),
PointGlobalScaling(min_scale=0.95, max_scale=1.05),
ShufflePoints(True),
ObjectRangeFilter(point_cloud_range=pc_range),
LidarReformat(),
]
)
else:
transforms = torchvision.transforms.Compose([Reformat()])
return transforms
10.4.12.2.3. 训练策略¶
为了训练一个精度高的模型,好的训练策略是必不可少的。对于每一个训练任务而言,不同阶段的模型(浮点、QAT) 其训练策略也会略有不同,因此,我们也把训练策略内容(optimizer, lr_schedule) 等也定义在 PointPillarsModel 里面:
class PointPillarsModel:
...
@classmethod
def optimizer(cls, model, stage):
"""训练时用到的 optimizer 设置"""
if stage == "float":
optimizer = torch.optim.AdamW(
params=model.parameters(),
betas=(0.95, 0.99),
lr=2e-4,
weight_decay=0.01,
)
elif stage == "qat":
optimizer = torch.optim.SGD(
params=model.parameters(),
lr=2e-4,
momentum=0.9,
weight_decay=0.0,
)
else:
optimizer = None
return optimizer
@classmethod
def lr_schedule(cls, stage):
"""训练时用到的学习率调整策略"""
if stage == "float":
lr_updater = CyclicLrUpdater(
target_ratio=(10, 1e-4),
cyclic_times=1,
step_ratio_up=0.4,
step_log_interval=50,
)
elif stage == "qat":
lr_updater = CyclicLrUpdater(
target_ratio=(10, 1e-4),
cyclic_times=1,
step_ratio_up=0.4,
step_log_interval=50,
)
else:
lr_updater = None
return lr_updater
@classmethod
def train_metrics(cls):
"""训练时打印 Log,只显示 loss 即可"""
return LossShow()
@classmethod
def val_metrics(cls):
"""模型评测的 Metric"""
class_names = ["Car"]
val_metrics = Kitti3DMetricDet(
compute_aos=True,
current_classes=class_names,
difficultys=[0, 1, 2],
)
return val_metrics
注解
如果需要复现精度,示例代码中的训练策略最好不要修改。否则可能会有意外的训练情况出现。
通过上面的介绍,我们已经完成了对模型训练相关所有模块的定义。不过,在开始训练之前,我们还需要有一个模型训练框架(比如可以使用HAT内置的训练框架,或者其他任意框架,可以完成训练即可)。 例如,下面的示例代码就是我们按照 Pytorch 的官方教程 和 示例代码 ,进行少量修改,构建的一个简单支持单机多卡DDP的”训练框架”:
def eval(model, val_dataloader, val_metrics, device=None):
model.eval()
for batch_data in tqdm.tqdm(val_dataloader):
batch_data = to_cuda(model, device=device)
pred_outs = model(batch_data)
val_metrics.update(pred_outs, batch_data)
metric_names, metric_values = val_metrics.get()
log_info = "\n"
for name, value in zip(metric_names, metric_values):
if isinstance(value, (int, float)):
log_info += "%s[%.2f] " % (name, value)
else:
log_info += "%s[%s] " % (str(name), str(value))
log_info += "\n"
logger.info(log_info)
return metric_values[0]
class Trainer:
def __init__(
self,
model: torch.nn.Module,
stage: str,
train_data: DataLoader,
optimizer: torch.optim.Optimizer,
lr_schedule: Any,
gpu_id: int,
save_every: int = 1,
log_freq: int = 100,
output_dir: str = "./tmp_models",
) -> None:
self.gpu_id = gpu_id
self.model = model.to(gpu_id)
self.stage = stage
self.train_data = train_data
self.optimizer = optimizer
self.save_every = save_every
self.model = DDP(model, device_ids=[gpu_id])
self.lr_schedule = lr_schedule
self.output_dir = output_dir
self.log_freq = log_freq
def _run_epoch(self, epoch):
self.model.train()
self.train_data.sampler.set_epoch(epoch)
for batch_id, batch_data in enumerate(self.train_data):
batch_data = to_cuda(batch_data, device=self.gpu_id)
# one batch
self.optimizer.zero_grad()
self.lr_schedule.on_step_begin(self.global_step_id)
output = self.model(batch_data)
loss = sum([v for v in output.values()])
loss.backward()
self.optimizer.step()
# log
if (batch_id + 1) % self.log_freq == 0:
loss_str = ""
for k, v in output.items():
loss_str += f" {k} [{round(v.item(), 4)}]"
loss_log = "Epoch[%d] Step[%d] GlobalStep[%d]: %s" % (
epoch,
batch_id,
self.global_step_id,
loss_str,
)
# only log on gpu 0
if self.gpu_id == 0:
logger.info(loss_log)
self.global_step_id += 1
def _save_checkpoint(self, epoch):
if not os.path.exists(self.output_dir):
os.makedirs(self.output_dir)
state = {
"epoch": epoch,
"state_dict": self.model.module.state_dict(),
}
ckpt_file = os.path.join(
self.output_dir, f"{self.stage}-checkpoint-best.pth.tar"
)
torch.save(state, ckpt_file)
logger.info(f"Epoch {epoch} | Training checkpoint saved at {ckpt_file}")
def train(self, max_epochs: int):
self.global_step_id = 0
self.lr_schedule.on_loop_begin(self.optimizer, self.train_data, max_epochs)
for epoch in range(max_epochs):
self._run_epoch(epoch)
# validation and save checkpoint
if (epoch + 1) % self.save_every == 0 or (epoch + 1) == max_epochs:
if self.gpu_id == 0:
# validation
eval(self.model, DataHelper.val_data_loader(), self.gpu_id)
# save checkpoint
self._save_checkpoint(epoch)
def train_entrance(
rank: int,
world_size: int,
model,
stage,
march,
output_dir,
total_epochs,
):
# set distribute
dist.init_process_group(
backend="NCCL",
init_method="tcp://localhost:%s" % "12345",
world_size=world_size,
rank=rank,
)
horizon.march.set_march(march)
train_data = DataHelper.train_data_loader()
optimizer = PointPillarsModel.optimizer(model, stage)
lr_schedule = PointPillarsModel.lr_schedule(stage)
trainer = Trainer(
model,
stage,
train_data,
optimizer,
lr_schedule,
rank,
output_dir=output_dir,
)
trainer.train(total_epochs)
dist.destroy_process_group()
def train(
model,
stage,
march,
device_ids,
output_dir,
total_epochs,
):
os.environ["CUDA_VISIBLE_DEVICES"] = device_ids
device_ids = device_ids.split(",")
world_size = len(device_ids)
mp.spawn(
train_entrance,
args=(
world_size,
model,
stage,
march,
output_dir,
total_epochs,
),
nprocs=world_size,
)
if __name__ == '__main__':
train(
model,
stage,
march,
device_ids,
output_dir,
total_epochs,
)
至此,我们已经完成了模型训练和评测的所需内容,读者可以在示例中查看完整代码。接下来就可以训练一个高精度的纯浮点的检测模型。 当然训练一个好的检测模型不是我们最终的目的,它只是做为一个pretrain为我们后面训练定点模型服务的。可以通过以下命令,启动浮点模型训练:
python3 examples/pointpillars_no_hat_trainer.py --stage "float" --device-ids "0,1,2,3" --train
10.4.12.3. 量化模型训练¶
当我们有了纯浮点模型之后,就可以开始训练相应的定点模型了。和浮点训练的方式一样,我们只需要通过运行下面的脚本就可以训练定点模型了:
python3 examples/pointpillars_no_hat_trainer.py --stage "qat" --device-ids "0,1,2,3" --train
通过上文中搭建模型结构部分时,我们已经了解到 Float Model 和 QAT Model 有些不同,主要体现在以下方面。
10.4.12.3.1. quantize参数的值不同¶
当我们训练量化模型的时候,需要设置 quantize=True,此时相应的浮点模型会被转换成量化模型,相关代码如下:
model.fuse_model()
model.set_qconfig()
horizon.quantization.prepare_qat(model, inplace=True)
关于量化训练中的关键步骤,比如准备浮点模型、算子替换、插入量化和反量化节点、设置量化参数以及算子的融合等,请阅读 量化感知训练 章节的内容。
10.4.12.3.2. 训练策略不同¶
正如我们之前所说,量化训练其实是在纯浮点训练基础上的finetue。因此量化训练的时候,我们的初始学习率设置为浮点训练的十分之一,
训练的epoch次数也大大减少,最重要的是 model 定义的时候,我们的 pretrained 需要设置成已经训练出来的纯浮点模型的地址。
做完这些简单的调整之后,就可以开始训练我们的量化模型了。
10.4.12.3.3. 模型验证¶
模型训练完成之后,我们还可以验证训练出来的模型性能。由于我们提供了float和qat两阶段的训练过程,相应的我们可以验证这两个阶段训练出来的模型性能, 只需要相应的运行以下两条命令即可:
python3 examples/pointpillars_no_hat_trainer.py --predict --stage "float" --device-ids "0" --ckpt ${float-checkpoint-file}
python3 examples/pointpillars_no_hat_trainer.py --predict --stage "qat" --device-ids "0" --ckpt ${qat-checkpoint-file}
同时,我们还提供了quantization模型的性能测试,只需要运行以下命令:
python3 examples/pointpillars_no_hat_trainer.py --predict --stage "int_infer" --device-ids "0" --ckpt ${int_infer-checkpoint-file}
这个显示出来的精度才是最终的int8模型的真正精度,当然这个精度和qat验证阶段的精度应该是保持十分接近的。
10.4.12.3.4. 仿真上板精度验证¶
除了上述模型验证之外,我们还提供和上板完全一致的精度验证方法,可以通过下面的方式完成:
python3 examples/pointpillars_no_hat_trainer.py --device-ids "0" --align-bpu-validation
10.4.12.3.5. 结果可视化¶
如果你希望可以看到训练出来的模型对于单帧雷达点云的检测效果,我们的tools文件夹下面同样提供了点云预测及可视化的脚本,你只需要运行以下脚本即可:
python3 examples/pointpillars_no_hat_trainer.py --device-ids "0" --visualize --input-points ${lidar-pointcloud-path} --is-plot
10.4.12.3.6. 模型检查和编译¶
在训练完成之后,可以使用 compile 的工具用来将量化模型编译成可以上板运行的 hbm 文件,同时该工具也能预估在BPU上的运行性能,可以采用以下脚本:
python3 examples/pointpillars_no_hat_trainer.py --compile --opt 3