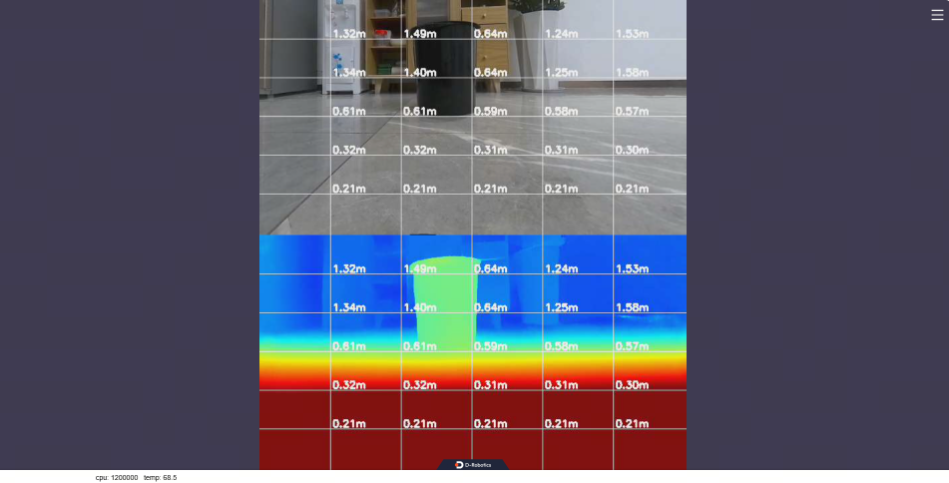
双目深度估计
地瓜双目深度估计算法输入为双目图像数据,输出为左视图对应的视差图和深度图。算法借鉴 IGEV 网络,采用了 GRU 架构,具有较好的数据泛化性和较高的推理效率。
仓库地址
IP 地址说明
- 使用闪连配置网络时 IP 为 http://192.168.128.10 。
- 使用有线网口配置网络时 IP 为 http://192.168.127.10 。
硬件型号说明
- 双目相机型号:GS130WI
- 图像传感器型号:SC132GS
模型版本
模型版本如下,默认使用 V2.4_int8。
| 平台 | 算法版本 | 量化方式 | 输入尺寸 | 最高帧率(fps) | 模型说明 |
|---|---|---|---|---|---|
| RDK X5 | V2.4_int16 | int16 | 640x352x3x2 | 15 | 当前主版本,高精度深度估计 |
| RDK X5 | V2.4_int8 | int8 | 640x352x3x2 | 23 | 当前主版本,高帧率深度估计 |
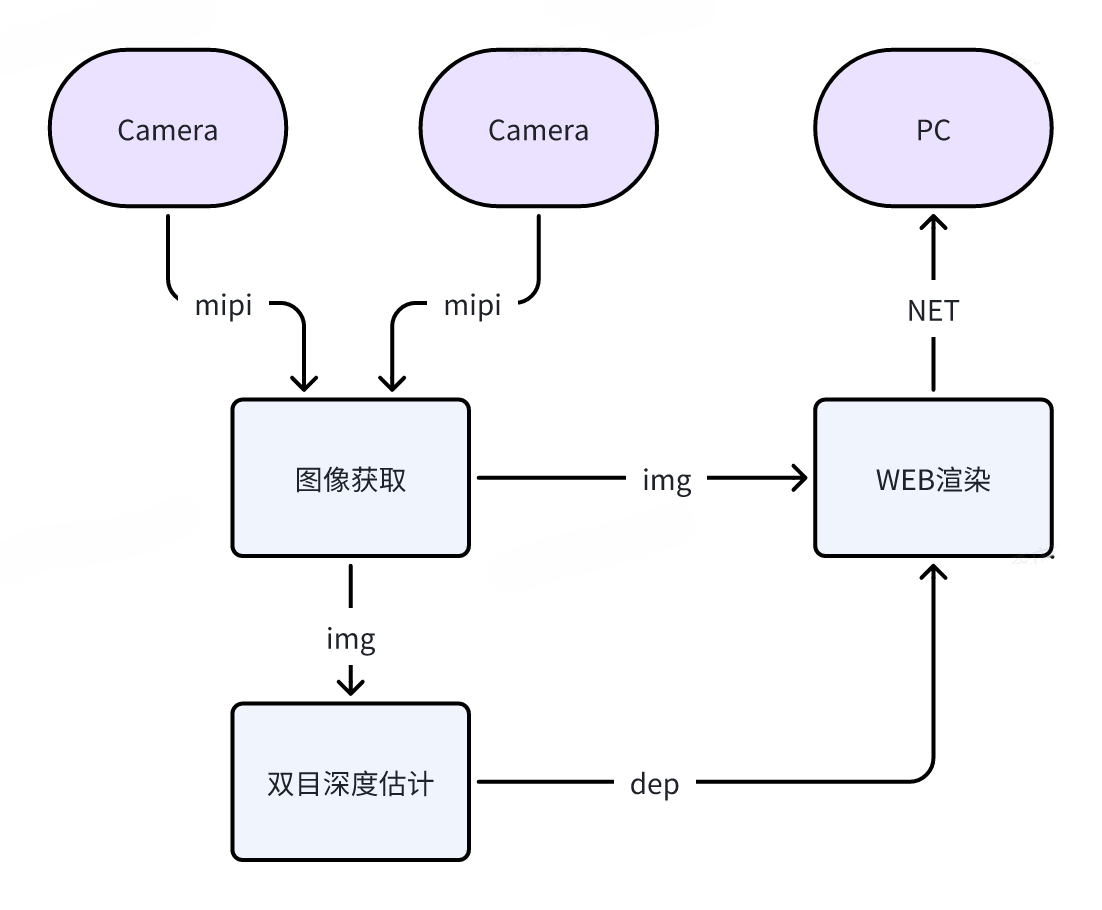
功能结构图
启动步骤
-
使用以下命令确认相机 I2C 信号正常。
i2cdetect -r -y 4
i2cdetect -r -y 6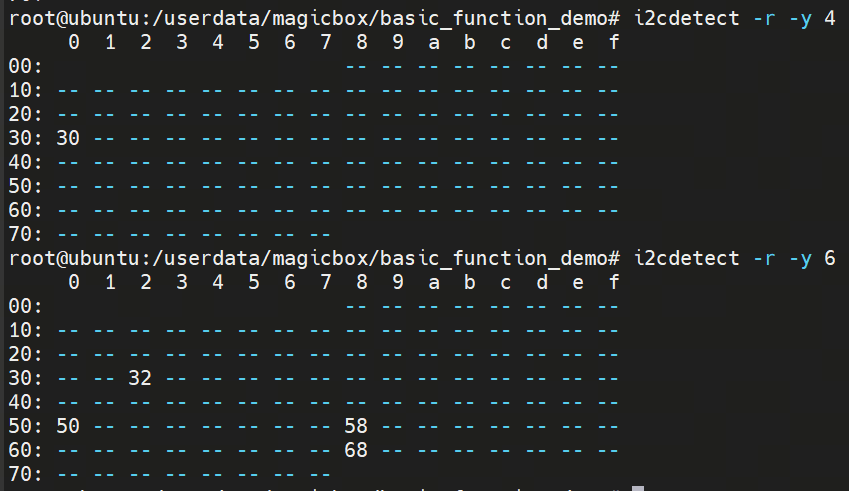
-
使用以下命令运行相机,通过网页访问 [IP]:8000 查看相机图像和深度估计结果。
cd /userdata/magicbox
source /opt/tros/humble/setup.bash
source app/ros_ws/install/setup.bash
bash app/ros_ws/src/magicbox/hobot_stereonet/script/run_stereo.sh --mipi_rotation 0.0 --stereonet_version v2.4_int8 --camera_info_topic /image_combine_raw/right/camera_info