车路协同方案¶
介绍¶
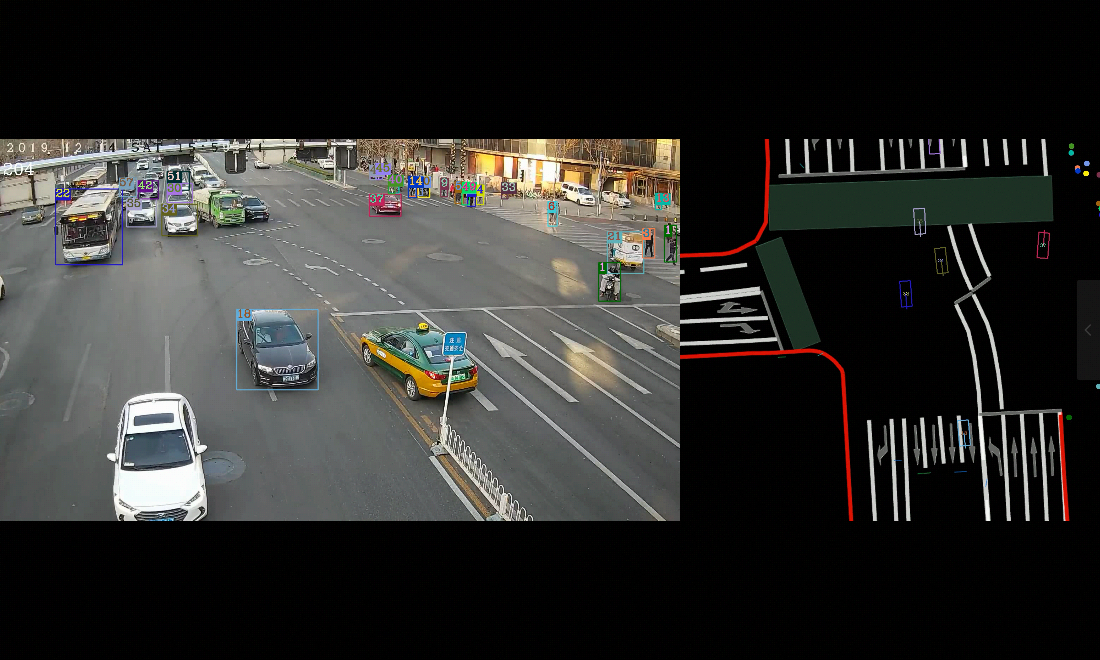
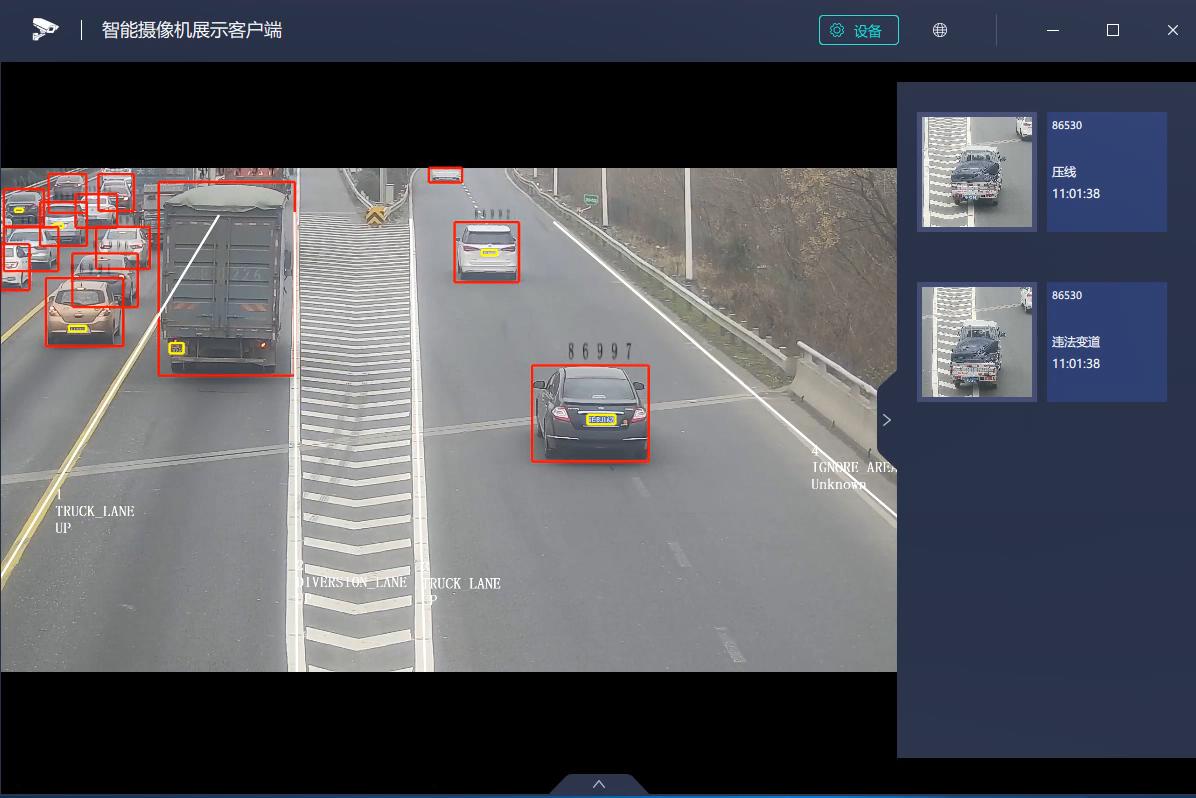
vehicle_solution 车路协同xstream演示demo。 本Demo通过监听VIO获取(视频)图片,通过xstream框架得到车路协同智能分析结果。 利用该方案,可以支持路口、高速卡口等需求场景。 效果截图:


能力集¶
输入¶
图片数据
输出¶
车路协同智能分析结果,包括以下内容:
车辆信息 速度、位置(GIS)、所在车道、车辆颜色、车辆类型、抓拍图、抓拍框、关键点
车牌信息 车牌号、车牌类型(单双牌)、车牌颜色、抓拍图、抓拍框、关键点
输出结果中,车辆和车牌是对应的。
相关Method¶
基础method FasterRCNNMethod、MOTMethod、CNNMethod、VoteMethod
特有method
FilterSkipFrameMethod 跳帧,降低终端设备的计算压力
PlateVoteMethod 车牌投票,在某些图片中车牌不清晰时,根据策略在有限帧数内选择最清晰的车牌作为最终结果
vehicle_snap_method 识别模块,输出识别结果,根据模型不同,可以支持人、机动车、非机动车、车牌等
vehicle_plate_match 车辆车牌匹配,根据vehicle_snap_method的识别结果,把识别到的车辆、车牌信息,一一匹配
vehicle_road_relationship 处理车路关系,用于确定车辆的速度、位置、车道号、违法行为等
编译¶
bash build.sh
运行¶
将部署包拷贝到板子上,即可运行。
export LD_LIBRARY_PATH=./lib
./vehicle_solution/vehicle_solution ./configs/vio_config.json.96board ./vehicle_solution/configs/smart_config.json ./vehicle_solution/configs/hbipc_config.json -i