智能语音
功能介绍
地平线智能语音算法采用本地离线模式,订阅音频数据后送给BPU处理,然后发布唤醒、命令词识别、声源定位DOA角度信息以及语音ASR识别结果等消息。智能语音功能的实现对应于TogetheROS.Bot的hobot_audio package,适用于地平线RDK配套的环形和线形四麦阵列。
代码仓库:https://github.com/HorizonRDK/hobot_audio.git
应用场景:智能语音算法能够识别音频中的唤醒词以及自定义的命令词,并将语音内容解读为对应指令或转化为文字,可实现语音控制以及语音翻译等功能,主要应用于智能家居、智能座舱、智能穿戴设备等领域。
语音控制小车运动案例:5.6. 语音控制小车运动
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| 地平线RDK | Ubuntu 20.04 | 启动音频模块算法,并在终端显示结果 |
注意:仅支持RDK X3,RDK X3 Module暂不支持。
准备工作
地平线RDK已烧录好地平线提供的Ubuntu 20.04系统镜像。
地平线RDK已成功安装TogetheROS.Bot。
地平线RDK已成功安装智能语音算法包,安装命令:
apt update; apt install tros-hobot-audio。按照以下方法在地平线RDK上接好环形或线形四麦音频板。
连接音频板
接口连接
环形麦克风阵列
环形麦克风板为一体化设计,实物如下图:
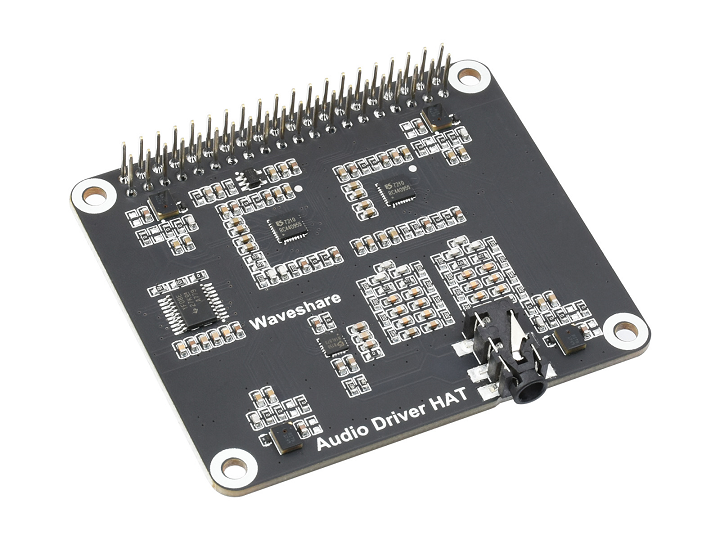
购买链接如下:
https://www.waveshare.net/shop/Audio-Driver-HAT.htm
连接步骤:
将麦克风板连接到地平线RDK X3 40PIN GPIO 接口上,连接后实物如下图:
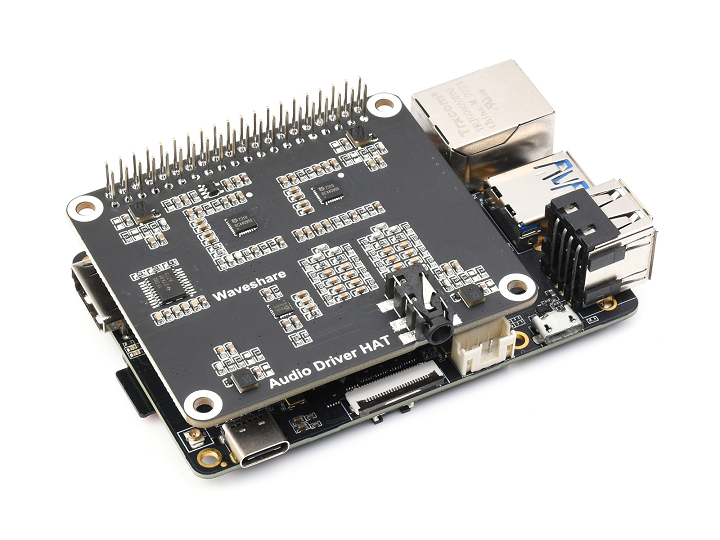
接上电源,网线等。
线形麦克风阵列
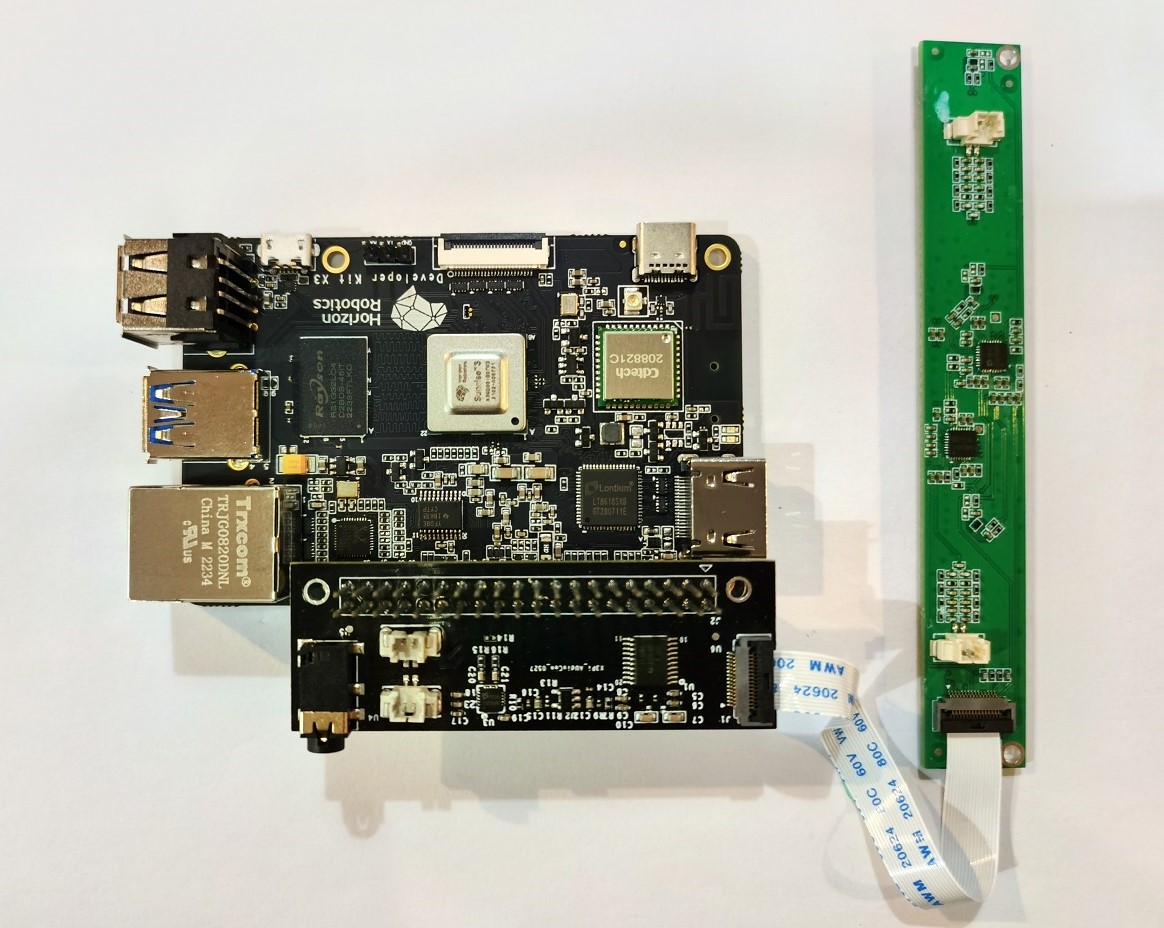
线形麦克风阵列由音频转接板和线形麦克风板两部分组成,实物图和连接说明如下:
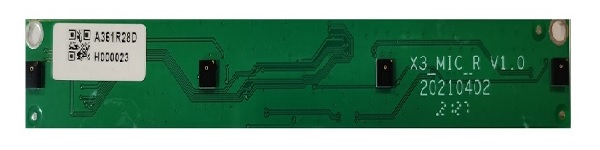
音频转接板:

线形麦克风板:
首先需要将地平线RDK X3与音频转接板连接,二者引脚与引脚均应对齐,连接实物图如下:
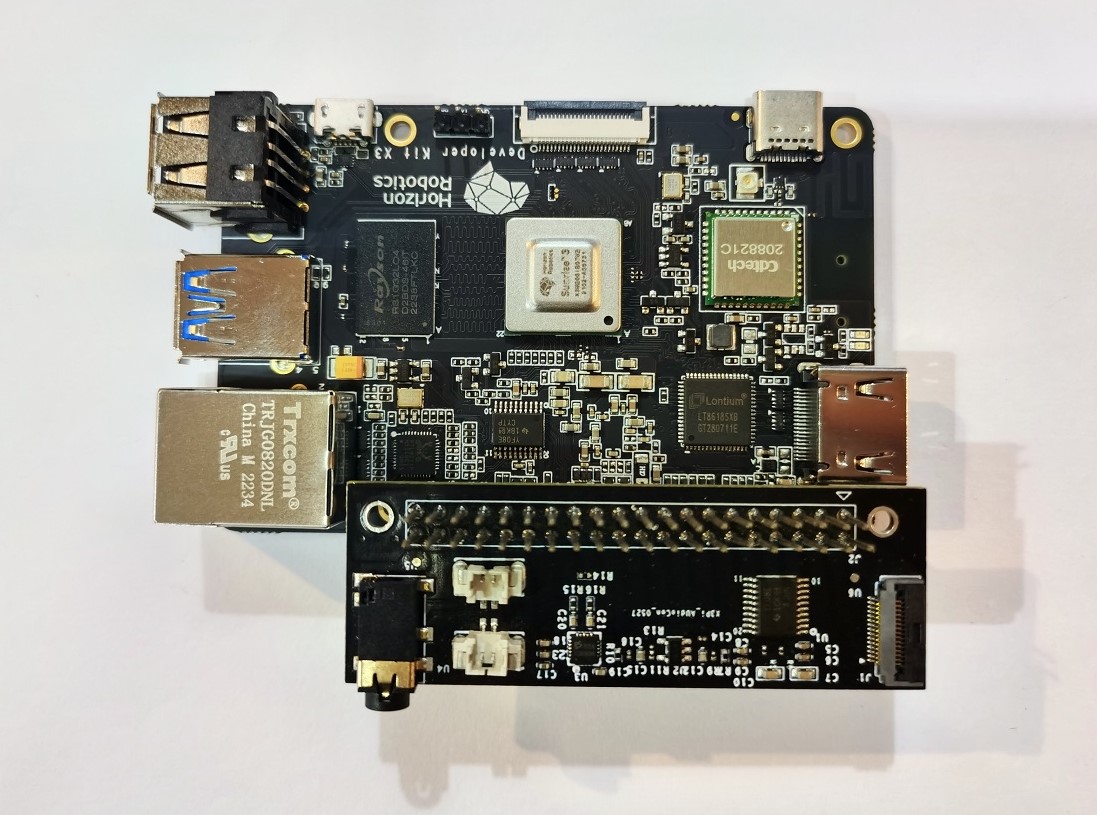
其次,需要将地平线RDK X3与麦克风阵列拾音板连接,转接板 FPC 接口通过15pin 异面FFC线缆接入到麦克风阵列拾音板,线缆金手指应朝下,连接实物图如下:
接上AEC的线。
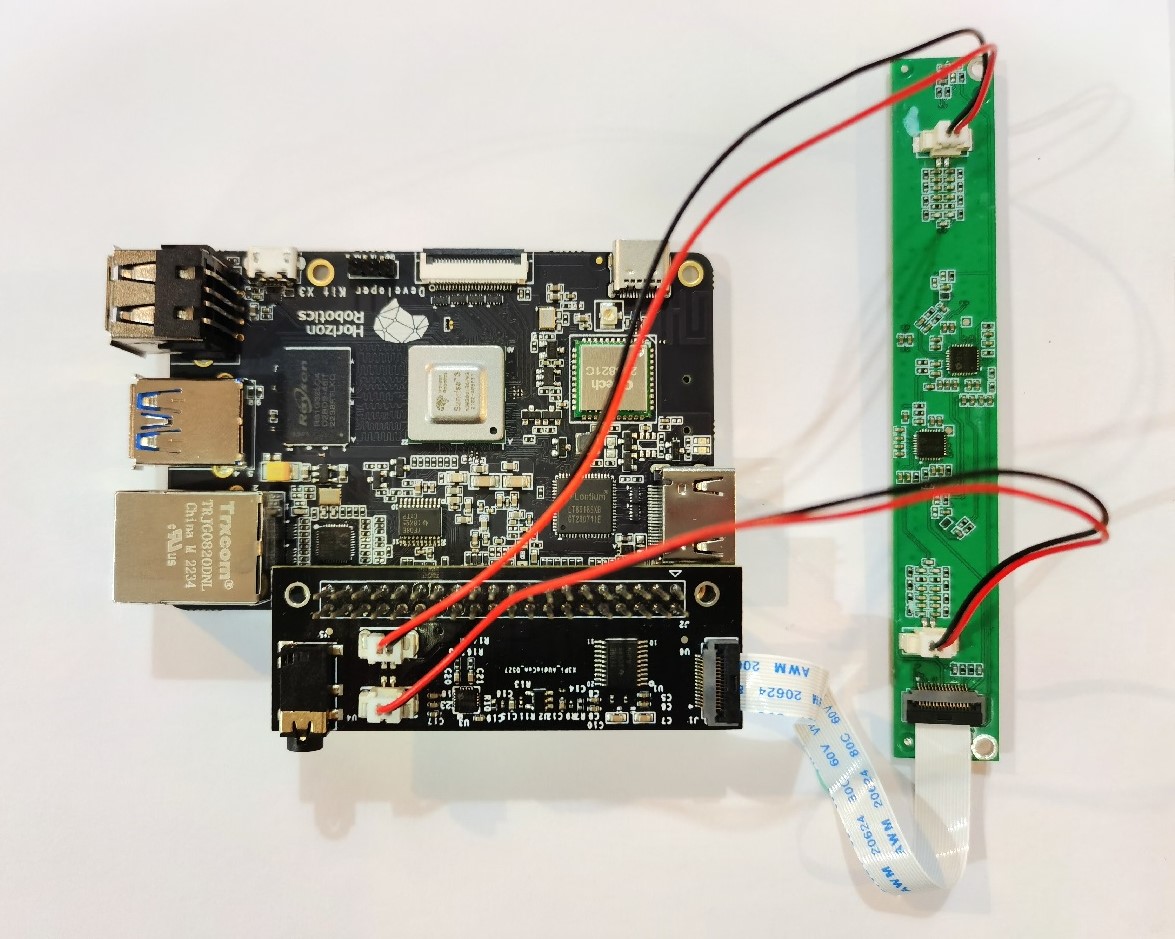
接上电源,网线等。
上电检查
将地平线RDK与麦克风阵列接好之后上电,在串口上使用指令i2cdetect -r -y 0可以检查设备的接入情况,若成功接好,默认可以在I2C上读取到三个地址。如下图:
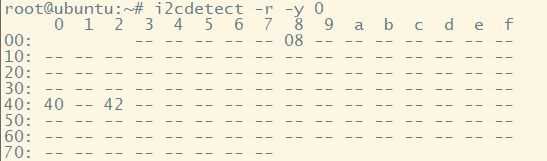
若没检测到,请重新检查设备的连接。
使用介绍
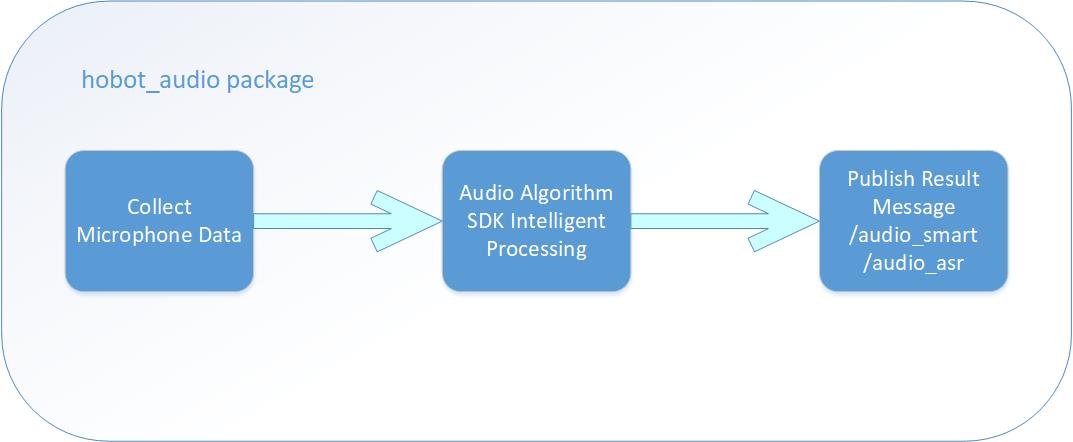
智能语音hobot_audio package开始运行之后,会从麦克风阵列采集音频,并且将采集到的音频数据送入语音智能算法SDK模块做智能处理,输出唤醒事件、命令词、ASR结果等智能信息,其中唤醒事件、命令词通过audio_msg::msg::SmartAudioData类型消息发布,ASR结果通过std_msgs::msg::String类型消息发布。
具体流程如下图:
智能语音功能支持对原始音频进行降噪之后进行ASR识别,默认的唤醒词和命令词定义在智能语音功能代码模块根目录下config/hrsc/cmd_word.json文件,默认为:
{
"cmd_word": [
"地平线你好",
"向前走",
"向后退",
"向左转",
"向右转",
"停止运动"
]
}
唤醒词以及命令词用户可以根据需要配置,若更改唤醒词效果可能会与默认的唤醒词命令词效果有差异。推荐唤醒词以及命令词使用中文,最好是朗朗上口的词语,且词语长度推荐使用3~5个字。
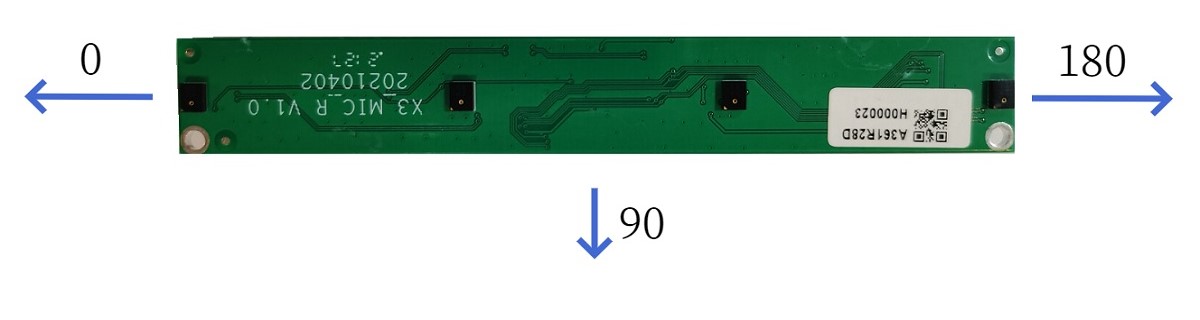
另外,智能语音功能支持输出声源定位的DOA角度信息,单位为角度,环形麦克风阵列取值范围:0度~360度,线形麦克风阵列取值范围:0度~180度。
角度的相对位置关系与麦克风的安装位置强相关,环形麦克风阵列DOA角度示意图如下:
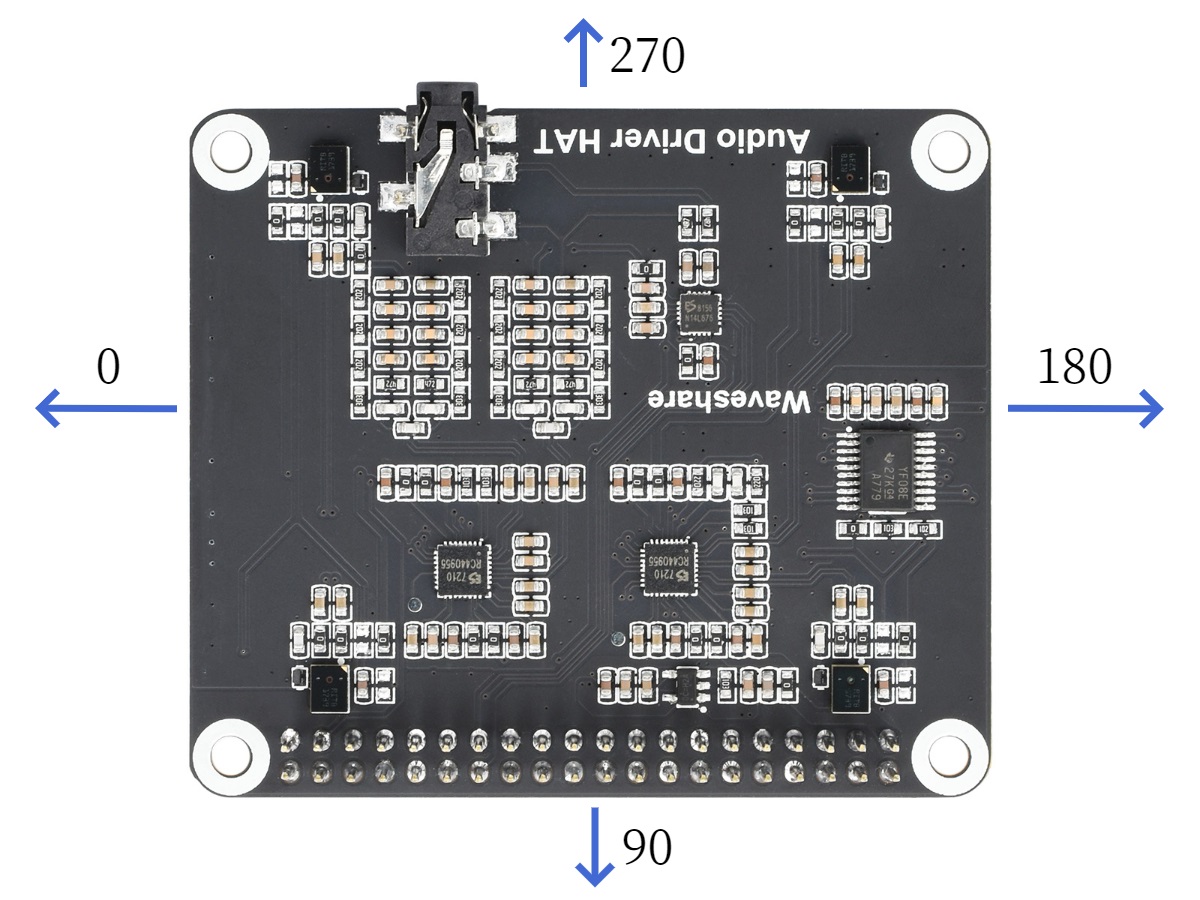
线形麦克风阵列DOA角度示意图如下:
地平线RDK板端运行hobot_audio package:
配置tros.b环境和拷贝配置文件
# 配置tros.b环境 source /opt/tros/setup.bash # 从tros.b的安装路径中拷贝出运行示例需要的配置文件。 cp -r /opt/tros/lib/hobot_audio/config/ .
选择麦克风阵列类型以及是否开启ASR结果输出
麦克风阵列类型和ASR输出均通过配置文件config/audio_config.json设置,该文件默认配置如下:
{ "micphone_enable": 1, "micphone_rate": 16000, "micphone_chn": 8, // mic+ref total num "micphone_buffer_time": 0, // ring buffer length in us "micphone_nperiods": 4, // period time in us "micphone_period_size": 512, // period_size, how many frames one period contains "voip_mode": 0, // whether the call mode is voice "mic_type": 0, // 0: cir mic; 1: linear mic "asr_mode": 0, // 0: disable, 1: enable asr after wakeup, 2: enable asr anyway "asr_channel": 3, // if asr_mode = 2, output specific channel asr, range(0-3) "save_audio": 0 }麦克风阵列类型通过
mic_type字段设置,默认值为0,表示环形麦克风阵列。如果使用线形麦克风阵列,需要修改该字段为1。ASR输出通过
asr_mode字段设置,默认值为0,表示不输出ASR结果。若要开启ASR结果输出,需要将该字段改为1或2,其中1表示唤醒后才输出ASR结果,2表示一直输出ASR结果。
加载音频驱动和启动应用
# 加载音频驱动,设备启动之后只需要加载一次 bash config/audio.sh #启动launch文件 ros2 launch hobot_audio hobot_audio.launch.py
注意:加载音频驱动时确保无其他音频设备连接,例如USB麦克风或带麦克风功能的USB摄像头,否则会导致应用打开音频设备失败,报错退出。
结果分析
在旭日X3板端运行终端输出如下信息:
alsa_device_init, snd_pcm_open. handle((nil)), name(hw:0,0), direct(1), mode(0)
snd_pcm_open succeed. name(hw:0,0), handle(0x557d6e4d00)
Rate set to 16000Hz (requested 16000Hz)
Buffer size range from 16 to 20480
Period size range from 16 to 10240
Requested period size 512 frames
Periods = 4
was set period_size = 512
was set buffer_size = 2048
alsa_device_init. hwparams(0x557d6e4fa0), swparams(0x557d6e5210)
以上log显示,音频设备初始化成功,并且打开了音频设备,可正常采集音频。
当人依次在麦克风旁边说出“地平线你好”、“向前走”、“向左转”、“向右转”、“向后退”命令词,语音算法sdk经过智能处理后输出识别结果,log显示如下:
recv hrsc sdk event wakeup success, wkp count is 1
[WARN] [1657869437.600230208] [hobot_audio]: recv event:0
recv hrsc sdk doa data: 100
recv hrsc sdk command data: 向前走
[WARN] [1657869443.870029101] [hobot_audio]: recv cmd word:向前走
recv hrsc sdk doa data: 110
recv hrsc sdk command data: 向左转
[WARN] [1657869447.623147766] [hobot_audio]: recv cmd word:向左转
recv hrsc sdk doa data: 100
recv hrsc sdk command data: 向右转
[WARN] [1657869449.865822772] [hobot_audio]: recv cmd word:向右转
recv hrsc sdk doa data: 110
recv hrsc sdk command data: 向后退
[WARN] [1657869452.313969277] [hobot_audio]: recv cmd word:向后退
log显示,识别到语音命令词“向前走”、“向左转”、“向右转”、“向后退”,并且输出DOA的角度信息,如“recv hrsc sdk doa data: 110”字段表示DOA角度为110度。
hobot_audio默认发布的智能语音消息话题名为:/audio_smart, 在另一个终端执行使用ros2 topic list命令可以查询到此topic信息:
$ ros2 topic list
/audio_smart
若开启ASR输出,发布消息话题为:/audio_asr,ros2 topic list结果为:
$ ros2 topic list
/audio_smart
/audio_asr