5.2. Nav2
功能介绍
Nav2(Navigation2)是ROS2中自带的导航框架,旨在寻找一种安全的方式让移动机器人从A点移动到B点。Nav2也可以应用于其他机器人导航应用,例如动态点跟踪,在这个过程中需要完成动态路径规划、计算电机速度、避免障碍等。
SLAM建图介绍了如何运行SLAM算法进行建图,本章节介绍如何基于建立的地图使用Nav2进行导航。同样使用Gazebo在PC端创建虚拟环境和小车,使用Rviz2设置导航目的地,地平线RDK运行Nav2程序导航。
目前TogetheROS.Bot已内置Nav2,不需要额外下载或编译即可使用。
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| 地平线RDK | Ubuntu 20.04 | PC端启动仿真环境,并在地平线RDK启动导航功能,最后通过Rviz2展示导航效果 |
准备工作
地平线RDK平台
地平线RDK已烧录好地平线提供的Ubuntu 20.04镜像。
地平线RDK已成功安装tros.b,并且已经添加ROS2的apt源,添加apt源的方法参见TogetheROS.Bot用户手册第二章2.5一节使用ROS2 package。
tros.b成功安装后,安装Nav2依赖的软件包graphicsmagick++和SLAM-Toolbox。
sudo apt update # 安装graphicsmagick++ sudo apt install libgraphicsmagick++-q16-12 # 安装ros2 SLAM-Toolbox sudo apt install ros-foxy-slam-toolbox cd /opt/tros # 使用/opt/tros目录下的create_soft_link.py创建ROS package至tros.b的软连接 sudo python3 create_soft_link.py --foxy /opt/ros/foxy/ --tros /opt/tros/
和地平线RDK在同一网段的PC,PC已安装Ubuntu 20.04系统、ROS2 Foxy桌面版和仿真环境Gazebo, 数据可视化工具Rviz2。
ROS2 Foxy安装参考:https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html
PC的ROS2安装成功后安装Gazebo和Turtlebot3相关的功能包以及navigation2,安装方法为:
sudo apt install ros-foxy-gazebo-* sudo apt install ros-foxy-turtlebot3* sudo apt install ros-foxy-navigation2 sudo apt install ros-foxy-nav2-bringup
使用介绍
地平线RDK平台
本章节介绍如何在PC端搭建仿真环境,以及进行导航目的地设置,地平线RDK运行导航功能,并查看导航效果。
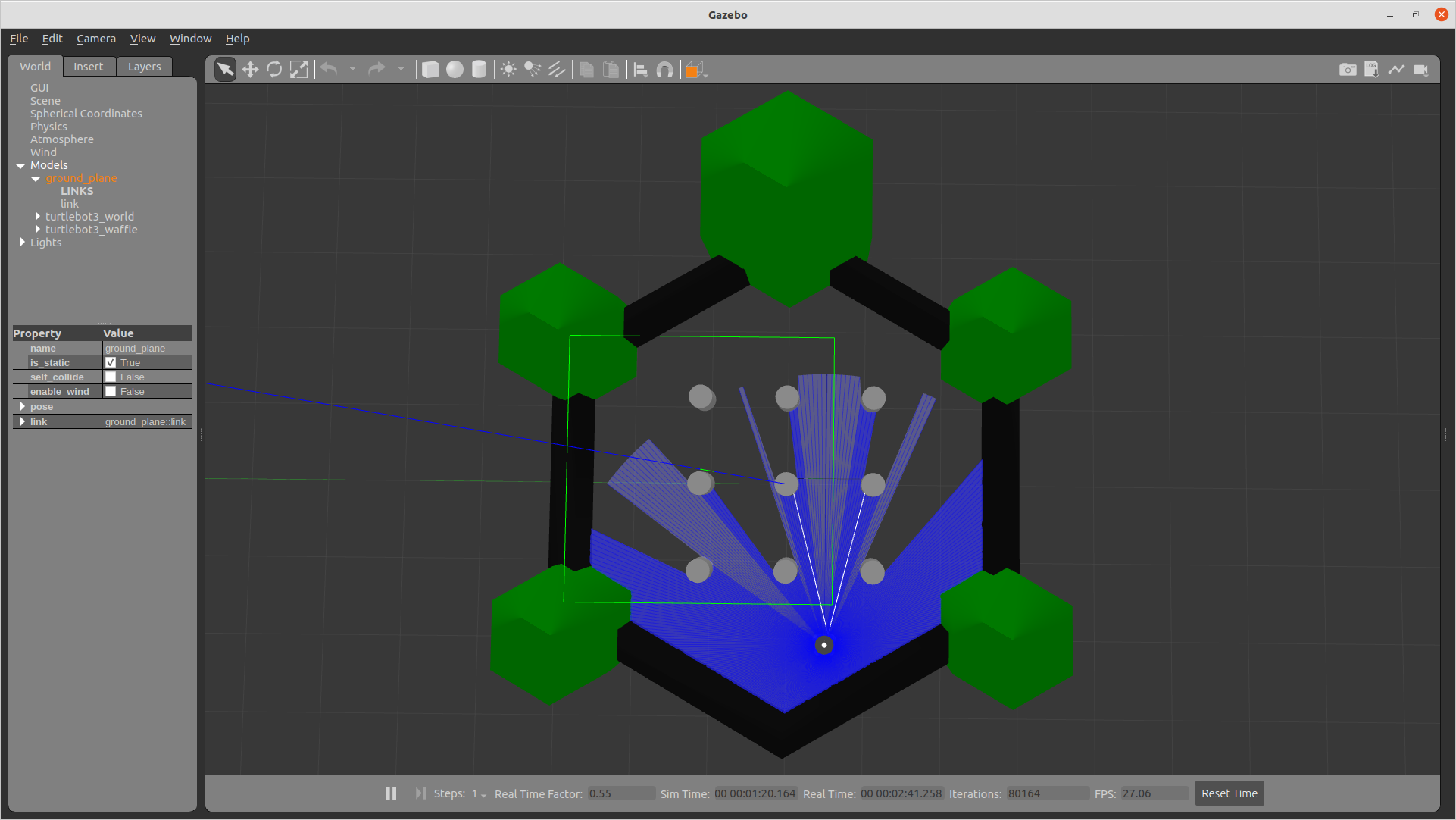
PC端启动gazebo仿真环境
source /opt/ros/foxy/setup.bash export TURTLEBOT3_MODEL=waffle ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
仿真环境如下图所示:
地平线RDK启动导航功能
source /opt/tros/setup.bash ros2 launch nav2_bringup bringup_launch.py use_sim_time:=True map:=/opt/tros/share/nav2_bringup/maps/turtlebot3_world.yaml
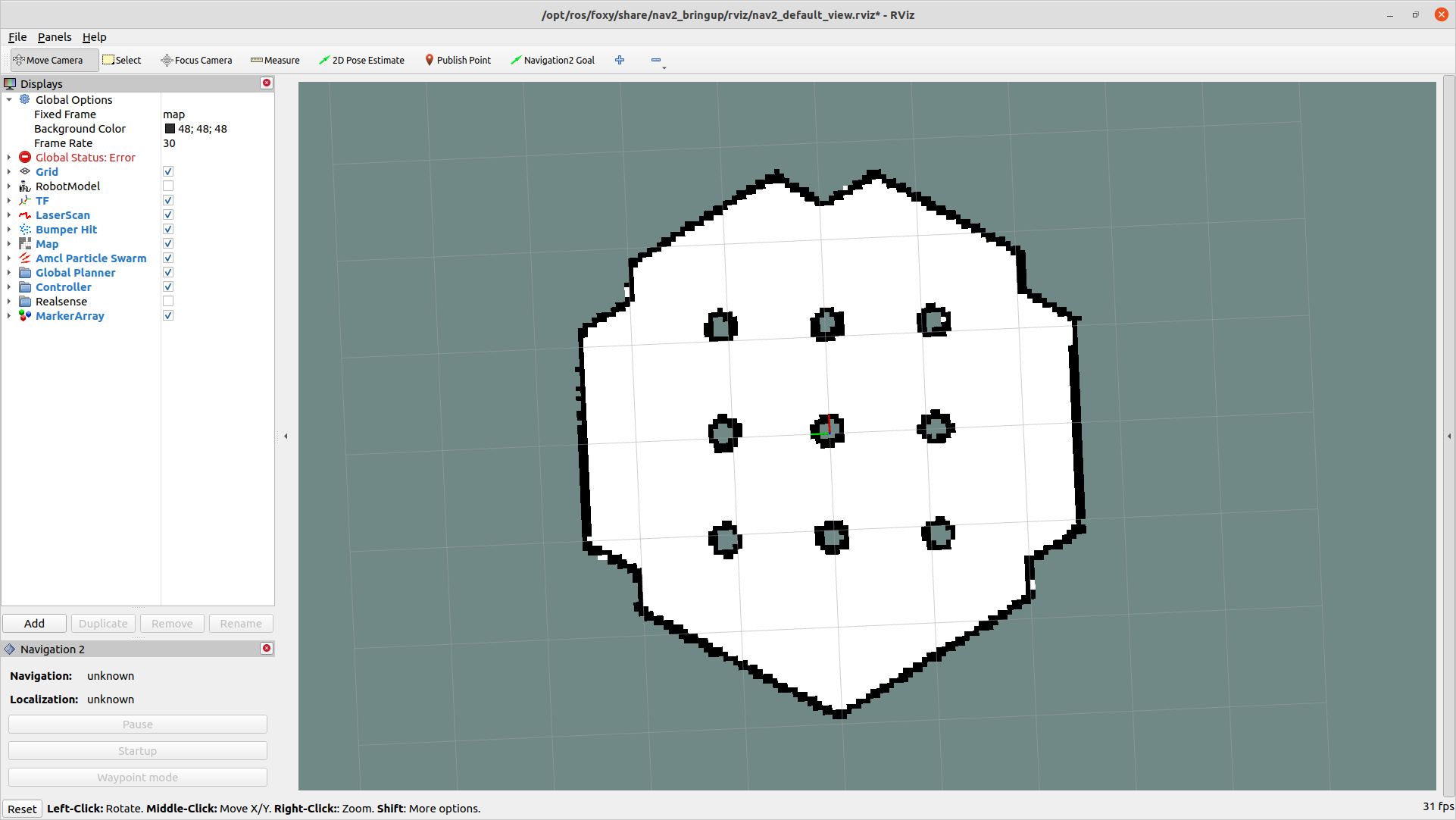
PC端启动Rviz2工具
source /opt/ros/foxy/setup.bash ros2 launch nav2_bringup rviz_launch.pyRviz2效果如下图:
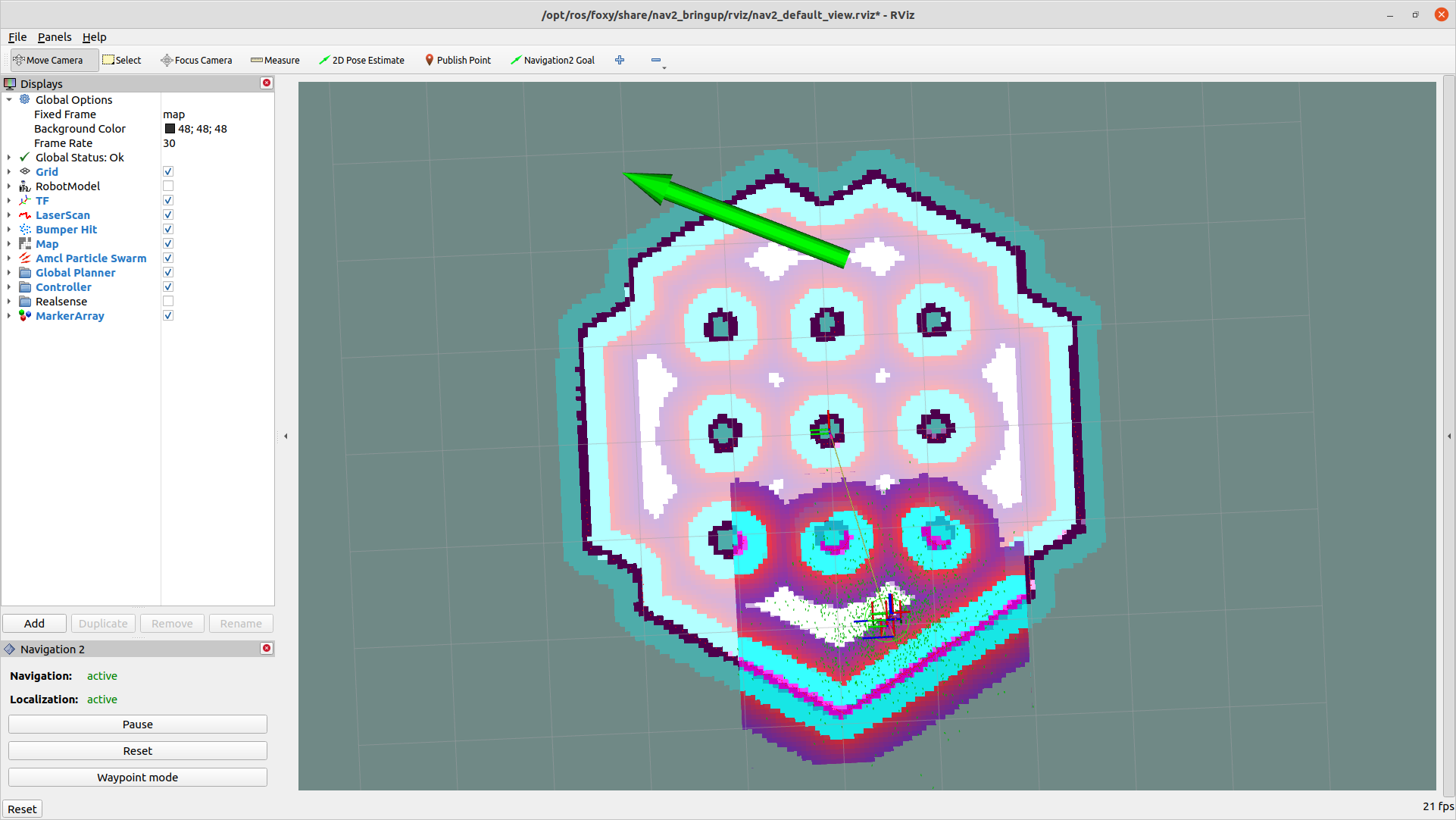
在Rviz2上设置机器人起始位置和方向
Rviz2启动后,机器人最初不知道它在哪里。默认情况下,Nav2会等待用户给机器人一个大致的起始位置。查看机器人在Gazebo中的位置,并在地图上找到该位置。通过点击Rviz2中的”2D Pose Estimate” 按钮,然后通过在地图上机器人预估的位置处点击来设置机器人初始位置 。可以通过向前拖动刚才单击的位置来设置机器人起始的移动方向。如下图所示:
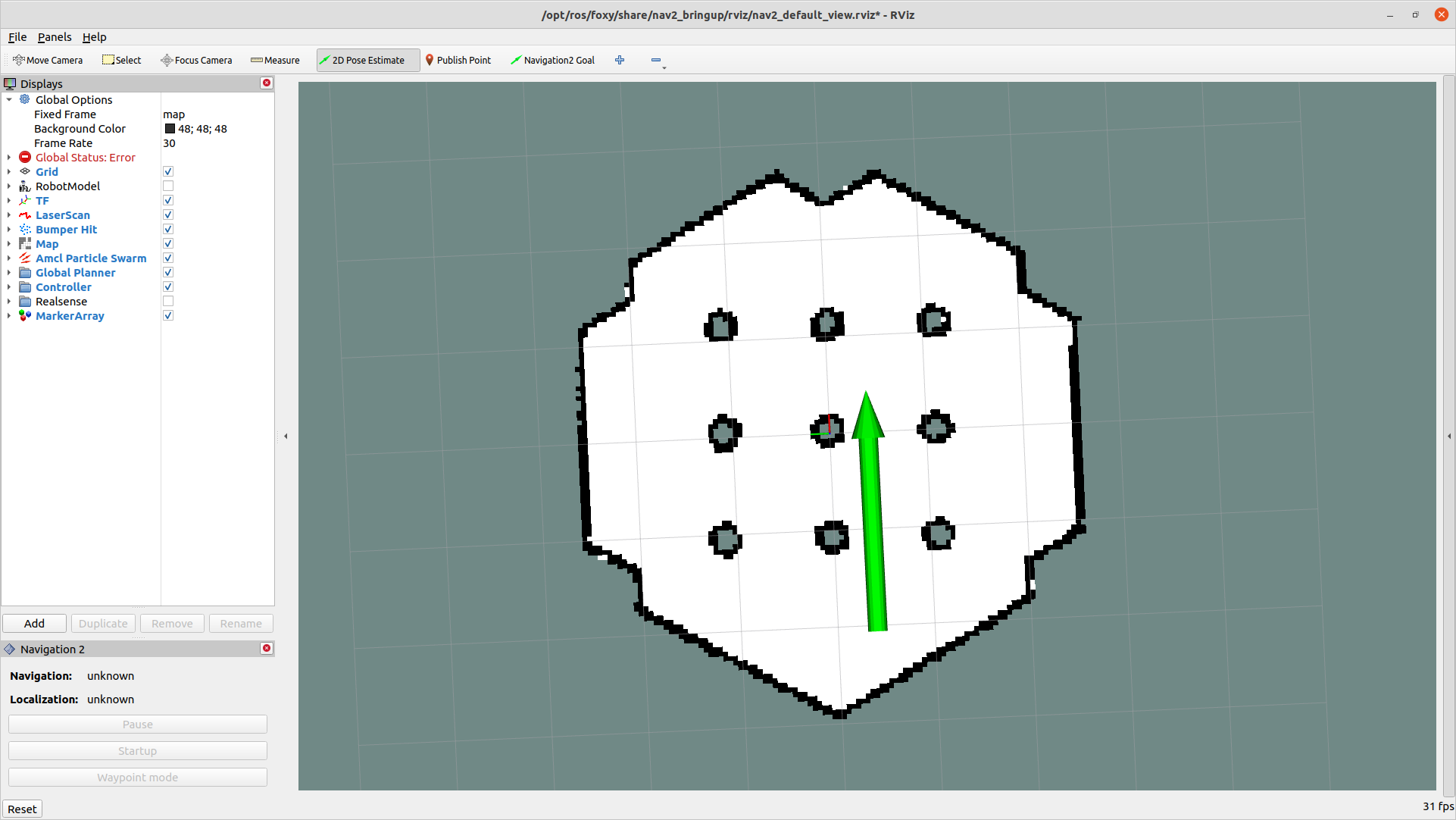
一旦设置好了机器人的初始位置,就会完成坐标变换树,同时Nav2将会完全激活并准备就绪。这时就可以看到机器人和点云了。
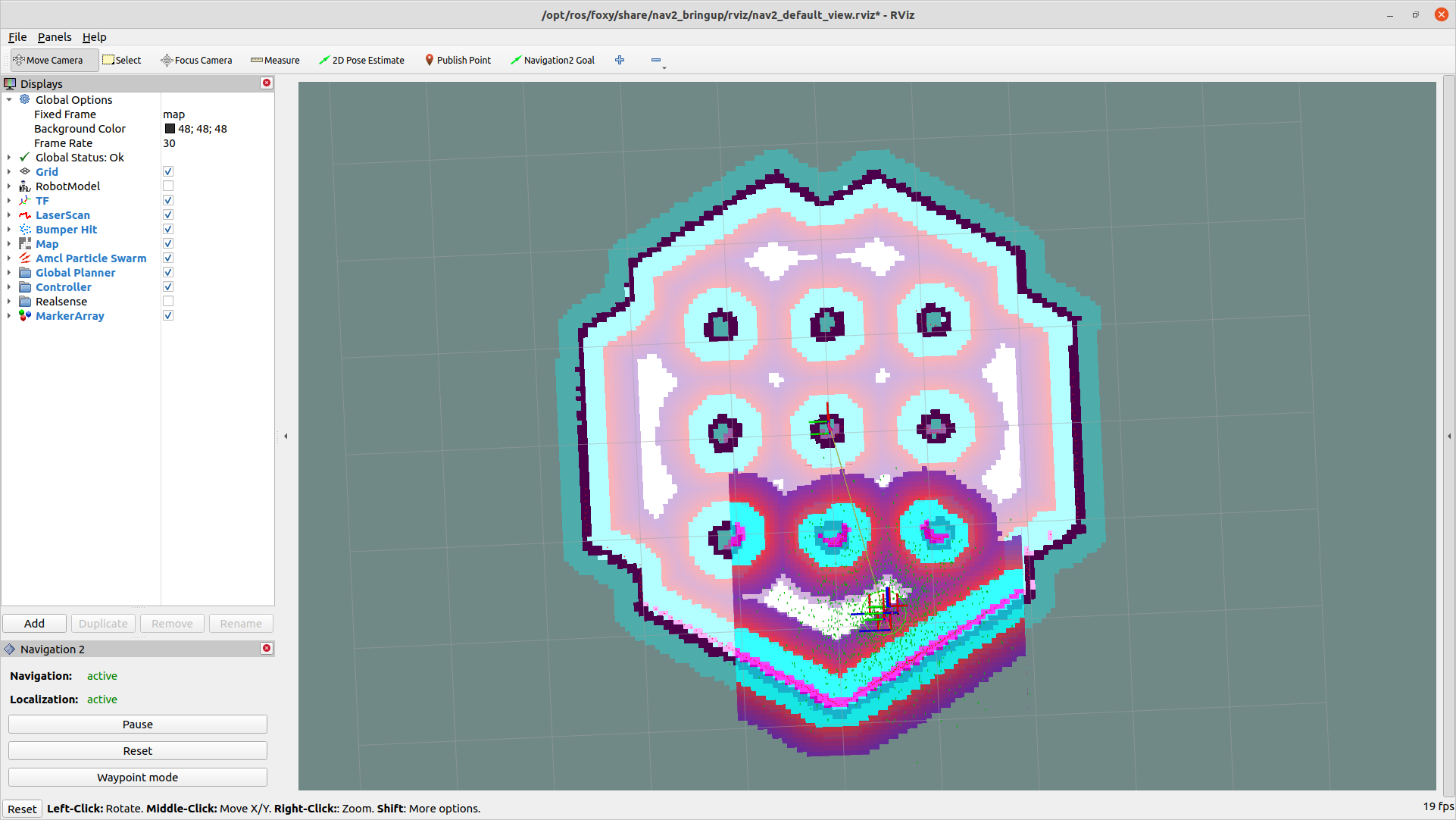
Rviz2设置目的地
点击 “Navigaton2 Goal” 按钮并选择一个目的地。
现在就可以看到机器人在移动了。
结果分析
导航效果如下图所示:
