1.1.2 RDK X5
相关下载资源请参考:下载资源汇总
包含规格书、原理图、机械尺寸图、3D图、参考设计资料等完整硬件资料。
接口总览
- RDK X5
- RDK X5 Module
RDK X5提供了网口、USB、摄像头、LCD、HDMI、CANFD、40PIN等功�能接口,方便用户进行图像多媒体、深度学习算法等应用的开发和测试。开发板接口布局如下:
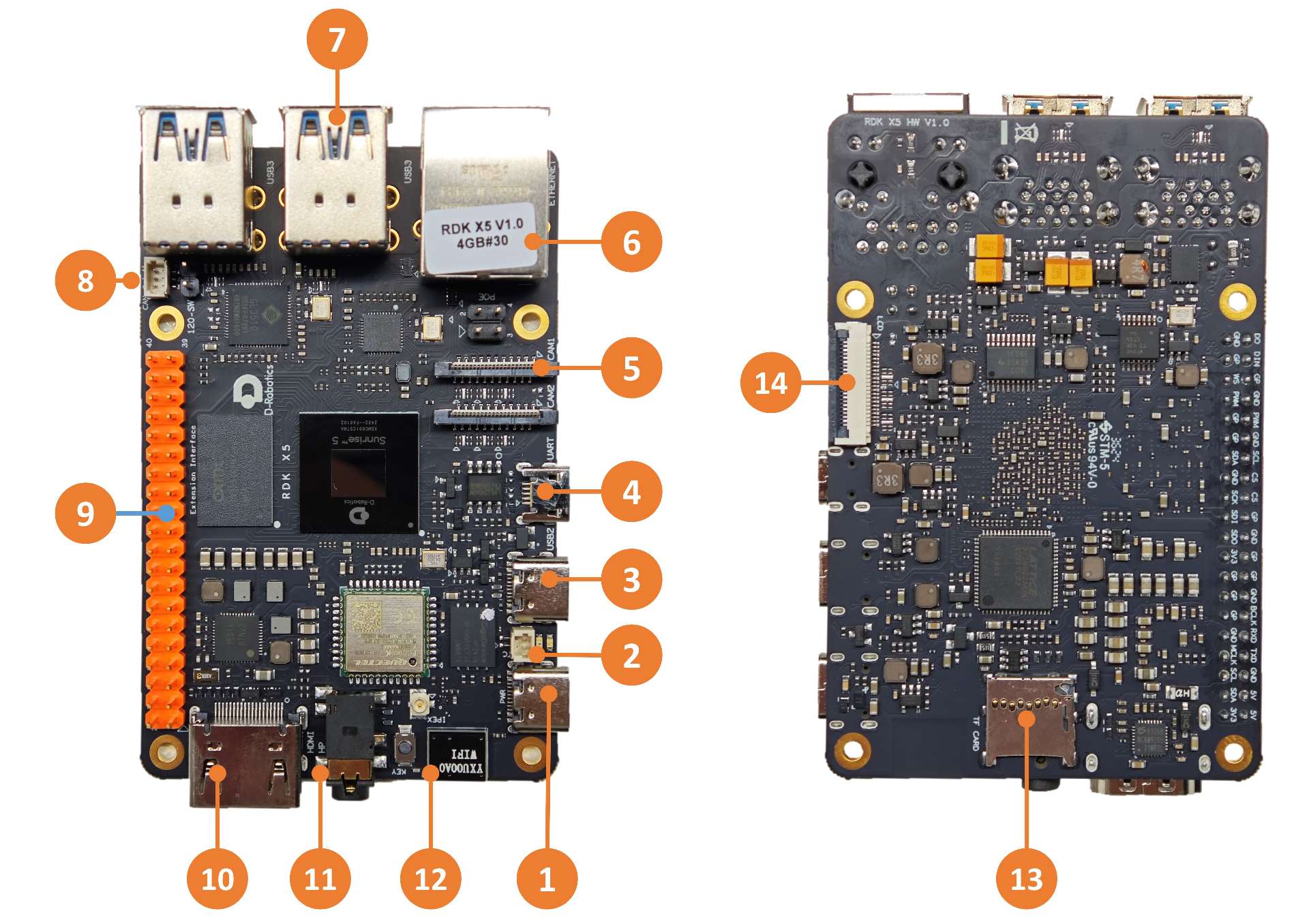
| 序号 | 功能 | 序号 | 功能 | 序号 | 功能 |
|---|---|---|---|---|---|
| 1 | 供电接口 (USB Type C) | 2 | RTC 电池接口 (靠近PWR的引脚为B+,另一引脚为GND) | 3 | 闪连接口 (USB Type C) |
| 4 | 调试串口(Micro USB) | 5 | 2 路 MIPI Camera 接口 | 6 | 千兆以太网口,支持 POE |
| 7 | 4 路 USB 3.0 Type A 接口 | 8 | CAN FD 高速接口 | 9 | 40PIN 接口 |
| 10 | HDMI 显示接口 | 11 | 多标准兼容耳机接口 | 12 | 板载 Wi-Fi 天线 |
| 13 | TF卡接口(底面) | 14 | LCD 显示接口(MIPI DSI) |
X5 MD采用核心板与IO载板分离的模块化设计方式,便于功能扩展与定制开发。
RDK X5 Module Carrier Board是RDK X5 Module的配套IO载板,提供了丰富的外设接口。
直出接口包括:
- 两路22Pin摄像头接口(集成MIPI CSI、LPWM&MCLK、I²C、GPIO)
- 一路HDMI接口
- 一路RJ45以太网接口
- 一路LCD接口(集成MIPI DSI和I²C)
- 40Pin扩展接口(包含GPIO、I²C、SPI、I²S、PWM)
- 多路功能控制接口等
经过IO载板外围器件处理后输出的接口包括:
- CAN总线接口(采用TCAN4550芯片,SPI转CAN)
- 耳机音频接口(基于ES8326B,支持I²S转音频DAC&ADC)
- 四路USB 3.0接口(通过GL3510 USB Hub扩展)
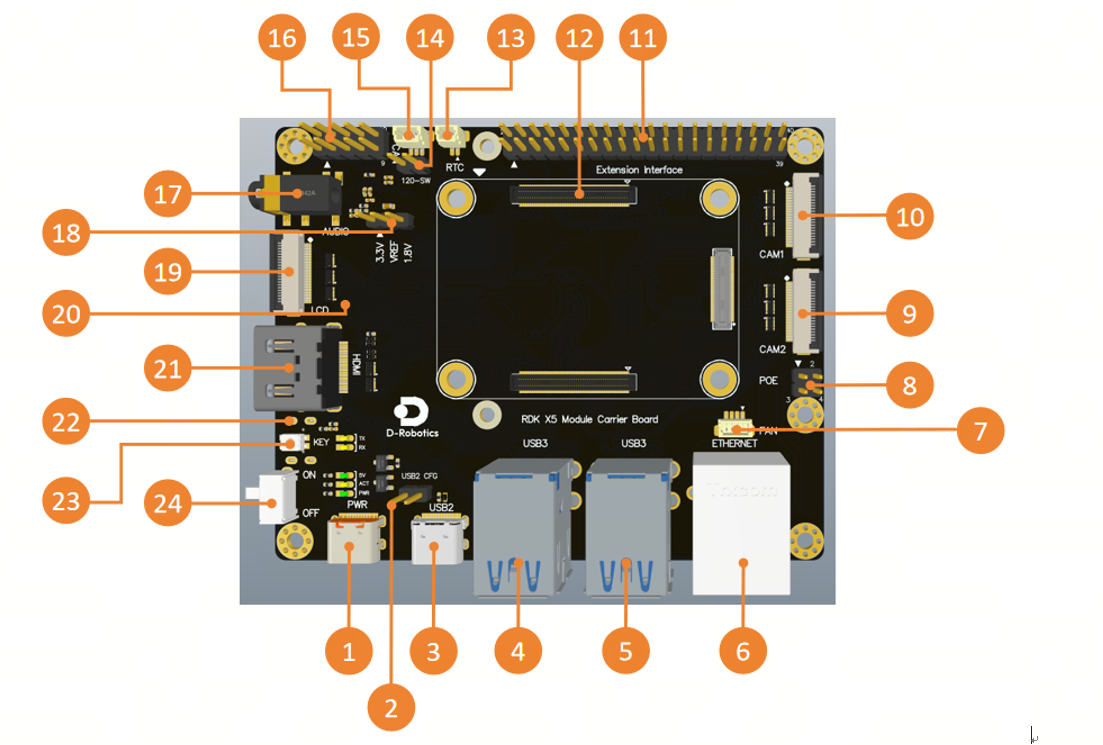
| 序号 | 功能 | 序号 | 功能 | 序号 | 功能 |
|---|---|---|---|---|---|
| 1 | USB Type C 5V/5A供电接口 | 9 | CAM2接口,4lane | 17 | Audio接口 |
| 2 | USB2.0配置header | 10 | CAM1接口,4lane | 18 | IO电平选择header |
| 3 | USB2.0 接口 | 11 | 40pin header | 19 | MIPI DSI接口 |
| 4 | USB3.0 HOST接口x2 | 12 | 核心模组接口 | 20 | Micro SD卡接口(背面) |
| 5 | USB3.0 HOST接口x2 | 13 | RTC电池接口 | 21 | HDMI接口 |
| 6 | 千兆以太网口 | 14 | CAN终端电阻接入开关 | 22 | Debug口,USB转串口(背面) |
| 7 | 风扇接口 | 15 | CAN总线接口 | 23 | Sleep按键 |
| 8 | POE 接口 | 16 | 功能控制IO header | 24 | 电源开关 |
RTC在给电池供电的时候,对电池的电压和放电电流要求为:2~3.3V ,>2.5uA。 开机后当 pmic 检测到 rtc 电压低到充电电压时,会自动给 rtc 充电,电池要求为:可承受的最大充电电压≥3.3V,最大可允许充入电流>1mA。 此外,非充电的RTC不可以使用进行供电
核心模组接口
- RDK X5
- RDK X5 Module
全板载设计, 无核心模组。
RDK X5 Module作为核心板,集成了D-Robotics Sunrise®5智能计算芯片及其关键电路设计,融合了PMIC电源管理模块、DDR、eMMC、QSPI NAND、Wi-Fi/蓝牙等核心功能单元。
核心板提供300针高速扩展接口,可灵活连接多种外设,满足各类应用场景的快速部署需求。
安装时需要首先确认正确的方向和定位,避免对核心模组、载板的连接器造成损伤。

模组安装方法如下:
- 对照核心模组pin脚,确认安装方向正确。
- 将核心模组放于载板正上方,并确认周围四个定位孔位置对齐。
- 从核心模组中心向下按压,当模组发出咔哒的声响后,表示安装到位。
电源接口
- RDK X5
- RDK X5 Module
开发板提供一路 USB Type C 接口(接口1),作为供电接口,需要使用支持5V/5A的电源适配器为开发板供电。将电源适配器接入开发板后,绿色 电源指示灯 亮起,说明开发板供电正常,3.1.0版本后,橙色 状态指示灯 闪烁,说明系统运行正常。
开发板提供一路 USB Type C 接口(接口1),作为供电接口,需要使用支持5V/5A的电源适配器为开发板供电。将电源适配器接入开发板后,绿色 5V指示灯 PWR指示灯 亮起,说明开发板供电正常,绿色 ACT指示灯 闪烁,说明系统运行正常。
请不要使用电脑USB接口为开发板供电,否则会因供电不足造成开发板异常断电、反�复重启等情况。
调试串口
- RDK X5
- RDK X5 Module
开发板提供一路调试串口(接口4),以实现串口登录、调试功能。电脑串口工具的参数配置如下:
- 波特率(Baud rate):115200
- 数据位(Data bits):8
- 奇偶校验(Parity):None
- 停止位(Stop bits):1
- 流控(Flow Control):无
串口连接时,需要将通过 Micro-USB 线,连接开发板接口 4 与 PC。
在内核启动阶段,波特率的配置位于 /boot/boot.cmd 文件中;
修正串口配置后,需要重新生成 boot.scr 文件,命令如下:mkimage -C none -A arm -T script -d boot.cmd boot.scr。
注意:如果将开发板的调试串口接入到Linux/ubuntu环境中,若linux/ubuntu系统中安装了brltty。可能会出现brltty抢占CH340驱动导致调试串口出现不识别问题。brltty会通过udev规则扫描接入系统的usb设备(如CH340、CP2102、FT232等),一旦发现设备,它会尝试“抢占”其控制权,导致调试串口出现不识别问题。因此,如果出现调试串口不识别问题,优先检查系统是否安装了brltty。如果brltty存在,建议使用apt remove brltty 命令卸载。
开发板提供一路调试串口(背面接口22),以实现串口登录、调试功能。电脑串口工具的参数配置如下:
- 波特率(Baud rate):921600
- 数据位(Data bits):8
- 奇偶校验(Parity):None
- 停止位(Stop bits):1
- 流控(Flow Control):无
串口连接时,需要将通过 Micro-USB 线,连接开发板接口22 与 PC。
在内核启动阶段,波特率的配置位于 /boot/boot.cmd 文件中;
修正串口配置后,需要重新生成 boot.scr 文件,命令如下:mkimage -C none -A arm -T script -d boot.cmd boot.scr。
通常情况下,用户第一次使用该接口时需要在电脑上安装 CH340 驱动,用户可搜索CH340串口驱动关键字进行下载、安装。
注意:如果将开发板的调试串口接入到Linux/ubuntu环境中,若linux/ubuntu系统中安装了brltty。可能会出现brltty抢占CH340驱动导致调试串口出现不识别问题。brltty会通过udev规则扫描接入系统的usb设备(如CH340、CP2102、FT232等),一旦发现设备,它会尝试“抢占”其控制权,导致调试串口出现不识别问题。因此,如果出现调试串口不识别问题,优先检查系统是否安装了brltty。如果brltty存在,建议使用apt remove brltty 命令卸载。
有线网口
开发板提供一路千兆以太网接口(接口6),支持1000BASE-T、100BASE-T标准,默认采用静态IP模式,IP地址为192.168.127.10 。如需确认开发板IP地址,可通过串口登录设备,并用ifconfig命令进行查看 eth0��网口的配置.
此外,该接口支持 PoE(Power over Ethernet,以太网供电)功能,无需额外的电源线即可通过网线同时传输数据和电力,使设备的安装更加简便灵活。
HDMI 显示接口
- RDK X5
- RDK X5 Module
开发板提供一路HDMI(接口10)显示接口,最高支持 1080P 分辨率。开发板通过HDMI接口在显示器输出Ubuntu系统桌面(Ubuntu Server版本显示logo图标)。此外,HDMI接口还支持实时显示摄像头、网络流画面功能。
开发板提供一路HDMI(接口21)显示接口,最高支持 1080P 分辨率。开发板通过HDMI接口在显示器输出Ubuntu系统桌面(Ubuntu Server版本显示logo图标)。此外,HDMI接口还支持实时显示摄像头、网络流画面功能。
USB 接口
- RDK X5
- RDK X5 Module
开发板��通过硬件电路实现了多路USB接口扩展,满足用户对多路USB设备接入的需求,接口描述如下:
| 接口类型 | 接口序号 | 接口数量 | 接口描述 |
|---|---|---|---|
| USB 2.0 Type C | 接口3 | 1路 | USB Device模式,用于连接主机实现ADB、Fastboot、系统烧录等功能 |
| USB 3.0 Type A | 接口7 | 4路 | USB Host模式,通过 HUB 扩展出 4 个 USB 端口,用于接入USB 3.0外设 |
开发板通过硬件电路实现了多路USB接口扩展,满足用户对多路USB设备接入的需求,接口描述如下:
| 接口类型 | 接口序号 | 接口数量 | 接口描述 |
|---|---|---|---|
| USB 2.0 Type C | 接口3 | 1路 | USB Device模式,用于连接主机实现ADB、Fastboot、系统烧录等功能 |
| USB 3.0 Type A | 接口4 & 接口5 | 4路 | USB Host模式,通过 HUB 扩展出 4 个 USB 端口,用于接入USB 3.0外设 |
USB 2.0 切换HOST
开发板可以短接接口2,将USB 2.0切换到HOST模式。
接入U盘
开发板 USB Type A 接口,支持U盘功能,可自动检测U盘接入并挂载,默认挂载目录为/media/sda1。
接入 USB 串口转接板
开发板USB Type A接口,支持USB串口转接板功能,可自动检测USB串口转接板接入并创建设备节点/dev/ttyUSB* 或者 /dev/ttyACM*(星号代表0开始的数字)。用户可参考 使用串口 章节对串口进行使用。
USB 摄像头
开发板 USB Type A 接口,支持 USB 摄像头功能,可自动检测USB摄像头接入并创建设备节点/dev/video0。
IO电平选择
- RDK X5
- RDK X5 Module
无该接口。
开发板提供一路 IO 电平选择接口(对应接口 18),可切换 IO 电平为 1.8V 或 3.3V。该设置会同时影响 40Pin 接口和 CAM 接口的 IO 电平。
MIPI Camera 接口
- RDK X5
- RDK X5 Module
开发板提供2路 22pin MIPI CSI接口(接口5),可实现2路MIPI摄像头的接入,支持双目相机的接入。目前开发板适配了多种规格的摄像头模组,模组型号、规格如下:
| 序号 | Sensor | 分辨率 | FOV | I2C 设备地址 |
|---|---|---|---|---|
| 1 | IMX219 | 800W | ||
| 2 | OV5647 | 500W | ||
| 3 | IMX477 | 1230W |
摄像头模组通过22pin 同向排线跟开发板连接,排线金属面背对黑色卡扣插入连接器。
安装完成后,用户可以通过i2cdetect命令确认模组I2C地址能否正常检测到。
查询靠近网口的mipi_host0 接口 上 Camera Sensor 的 I2C 设备地址:
echo 353 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio353/direction
echo 0 > /sys/class/gpio/gpio353/value
sleep 0.1
echo 1 > /sys/class/gpio/gpio353/value
i2cdetect -y -r 6
查询远离网口的mipi_host2 接口 上 Camera Sensor 的 I2C 设备地址:
echo 351 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio351/direction
echo 0 > /sys/class/gpio/gpio351/value
sleep 0.1
echo 1 > /sys/class/gpio/gpio351/value
i2cdetect -y -r 4
成功探测到Camera Sensor 的 I2C 设别地址时,可以看到如下所示的打印(以在接口 mipi_host2 上探测 IMX219 为例,可以发现 10 地址被打印出来了):
root@ubuntu:~# i2cdetect -y -r 4
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: 10 -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
开发板提供2路 22pin MIPI CSI接口 CAM1(接口10) CAM2(接口9),可实现2路MIPI摄像头的接入,支持双目相机的接入。目前开发板适配了多种规格的摄像头模组,模组型号、规格如下:
| 序号 | Sensor | 分辨率 | FOV | I2C 设备地址 |
|---|---|---|---|---|
| 1 | IMX219 | 800W | ||
| 2 | OV5647 | 500W | ||
| 3 | IMX477 | 1230W |
IO电平(接口 18)要选择3.3V。
摄像头模组通过22pin 同向排线跟开发板连接,排线金属面背对黑色卡扣插入连接器。
安装完成后,用户可以通过i2cdetect命令确认模组I2C地址能否正常检测到。
查询靠CAM1(接口10) 接口 上 Camera Sensor 的 I2C 设备地址:
echo 353 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio353/direction
echo 0 > /sys/class/gpio/gpio353/value
sleep 0.1
echo 1 > /sys/class/gpio/gpio353/value
i2cdetect -y -r 6
查询CAM2(接口9) 接口 上 Camera Sensor 的 I2C 设备地址:
echo 351 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio351/direction
echo 0 > /sys/class/gpio/gpio351/value
sleep 0.1
echo 1 > /sys/class/gpio/gpio351/value
i2cdetect -y -r 4
成功探测到Camera Sensor 的 I2C 设别地址时,可以看到如下所示的打印(以在CAM2(接口9) 上探测 IMX219 为例,可以发现 10 地址被打印出来了):
root@ubuntu:~# i2cdetect -y -r 4
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: 10 -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
重要提示:严禁在开发板未断电的情况下插拔摄像头,否则非常容易烧坏摄像头模组。
LCD 显示接口
- RDK X5
- RDK X5 Module
RDK X5 提供一路 MIPI DSI 的 LCD 显示接口(接口14),可以用于 LCD 显示屏等接入。接口为22pin,可使用DSI-Cable-12cm线材直接接入树莓派多款 LCD 显示屏。
RDK X5 Module 提供一路 MIPI DSI 的 LCD 显示接口(接口19),可以用于 LCD 显示屏等接入。接口为22pin,可使用DSI-Cable-12cm线材直接接入树莓派多款 LCD 显示屏。
Micro SD 接口
- RDK X5
- RDK X5 Module
开发板提供1路Micro SD存储卡接口(接口13)。推荐使用至少16GB容量的存储卡,以便满足Ubuntu操作系统及相关功能包的安装要求。
开发板提供1路Micro SD存储卡接口(背面接口22)。推荐使用至少16GB容量的存储卡,以便满足Ubuntu操作系统及相关功能包的安装要求。
开发板使用中禁止热插拔TF存储卡,否则会造成系统运行异常,甚至造成存储卡文件系统损坏。
Wi-Fi 天线接口
- RDK X5
- RDK X5 Module
开发板的无线网络支持板载和外置天线两种配置,通常情况下板载天线可以满足使用需求。当开发板安装金属材质外壳后,需要连接外置天线到(接口12旁的天线接口),以增强信号强度。
天线接口规格:
- 接口类型: IPEX 1 代
- 频率:支持 2.4GHz/5GHz Wi‑Fi 传输
开发板的无线网络采用外置天线配置,需要连接外置天线到核心板上,以增强信号强度。
天线接口规格:
- 接口类型: IPEX 1 代
- 频率:支持 2.4GHz/5GHz Wi‑Fi 传输
CANFD 接口
- RDK X5
- RDK X5 Module
40PIN 接口
- RDK X5
- RDK X5 Module
RDK X5开发板提供 40PIN 接口,IO 信号采用 3.3 V电平设计。管脚定义兼容树莓派等产品,详细管脚定义、复用关系参考硬件开发章节。
RDK X5 Module 开发板提供 1 路 40PIN 接口,方便用户扩展外围接口,对应接口 11。
40PIN 上的所有 IO 管脚支持通过电平选择接口(接口 18)来切换 3.3V 和 1.8V 电压域。
连接器型号
- RDK X5
- RDK X5 Module
| 连接器 | 型号 | 厂商 | 描述 |
|---|---|---|---|
| J1 | HDGC1002WV-S-2P | HDGC (华德共创) | RTC 电池接口 |
| J14/J15 | AFC11-S22ICA-00 | JS (钜硕电子) | MIPI Camera 接口 |
| J16 | AFC01-S22FCA-00 | JS (钜硕电子) | LCD 显示接口 |
| J18 | HDGC1002WV-S-3P | HDGC (华德共创) | CAN FD 高速接口 |
| 连接器 | 型号 | 厂商 | 描述 |
|---|---|---|---|
| J1/J21 | DF40C-100DS-0.4V(51) | HRS(广濑) | 100P连接器 |
| J3 | DF40C-60DS-0.4V(51) | HRS(广濑) | 60P连接器 |
| J4 | PZ254V-12-10P | XFCN(兴飞) | 功能控制IO header |
| J5 | WAFER-SH1.0-2PLB | XFCN(兴飞) | RTC电池接口 |
| J7/J8/J10 | FPC-05F-22PH20 | XUNPU(讯普) | CAM接口,MIPI DSI接口 |
| J15 | WAFER-SH1.0-4PLB | XUNPU(讯普) | 风扇接口 |
| J18 | WAFER-SH1.0-3PLB | XUNPU(讯普) | CAN总线接口 |
| J20 | PH2.54-01-02PZS | XUNPU(讯普) | POE 接口 |
接口电源负��载能力
以下数据均为单个接口能提供的负载电流,多个接口同时使用时,可能会受影响。
- RDK X5
- RDK X5 Module
| 接口 | 负载能力 |
|---|---|
| CAN接口 | 500mA @ 3.3V |
| DSI接口 | 500mA @ 3.3V |
| 40Pin接口 | 1A @ 3.3V/1A @ 5V |
| USB3接口 | 1A @ 5V |
| 接口 | 负载能力 |
|---|---|
| CAN接口 | 500mA @ 3.3V |
| DSI接口 | 500mA @ 3.3V |
| 40Pin接口 | 1A @ 3.3V/1A @ 5V |
| USB3接口 | 1A @ 5V |